
16.04.2025
2 хв
1296

Ця стаття — повний гід для тих, хто хоче зрозуміти, що таке дрон, як він влаштований і на яких принципах працює. Ви дізнаєтьсь, чим дрон відрізняється від інших БПЛА, які компоненти входять до його складу, як працюють GPS, автопілот і сенсори, і чому саме ці технології дозволяють апарату літати без участі людини. Матеріал охоплює основи аеродинаміки — вагу, підйомну силу, тягу та лобовий опір, а також пояснює, як працює польотний контролер, навіщо потрібні ручки керування на пульті та що таке режим Mode 2.

Якщо ви не ізольовані від світу, то напевно не раз бачили слово «дрон» у новинах. Це слово зустрічається в різноманітних заголовках і може позначати як невеликі радіокеровані моделі, так і великі бойові безпілотники, оснащені озброєнням. Причина — різні джерела вкладають у слово «дрон» різний зміст. Тож виникає питання: де проходить межа, і що саме робить дрон дроном? Почнемо з базових термінів.
Словник видавництва “Merriam-Webster” визначає термін дрон (англ. drone) як: «Безпілотний літальний апарат або повітряне судно, яким керують дистанційно або за допомогою бортового комп’ютера».
Це формулювання занадто широке й часто призводить до плутанини або навіть дезінформації, особливо коли йдеться про конкретні типи БПЛА. Щоб уникнути непорозумінь, важливо уточнювати: за словами експерта Террі, головна відмінність між просто радіокерованим літальним апаратом і дроном — це наявність систем GPS і автопілота. Тобто щойно апарат здатен утримувати позицію самостійно або літати без участі пілота — він вже вважається дроном.
У нашій книзі ми будемо дотримуватись саме такого підходу.
Дрон — це безпілотний літальний апарат, який здатний автономно виконувати політ завдяки використанню навігаційних систем (GPS, інерційних систем, сенсорів тощо) і бортового комп’ютера. Тобто пілот може взагалі не втручатись у процес польоту — апарат сам знає, куди летіти й як стабілізуватись у повітрі.
Дистанційно керований літальний апарат (ДКЛА) — це будь-який літальний пристрій, яким керує оператор із землі за допомогою пульта, радіоканалу або іншої форми зв’язку. Такий апарат не здатен діяти самостійно й повністю залежить від команд людини.
Безпілотний літальний апарат (БПЛА) — це загальна категорія, що охоплює обидва типи: як дистанційно керовані, так і ті, що працюють автономно. Головна ознака — на борту немає пілота, а керування здійснюється дистанційно або через програму польоту.
Системи малої авіоніки — під цим мають на увазі всі електронні та програмні рішення, які використовуються у безпілотних апаратах: автопілоти, стабілізатори, GPS-модулі, сенсори, процесори, системи зв’язку та обробки даних. Ці технології — мозок дрона.
Подобається нам це чи ні, але слово «дрон» вже стало популярним брендом у публічному просторі. Його вживають усюди — від дитячих іграшок до бойових безпілотників. І, чесно кажучи, це створює плутанину. Ми ж у цьому тексті намагатимемось повернути цьому терміну чітке значення, показати, що насправді стоїть за цими технологіями, і пояснити, чому малі БПЛА можуть мати позитивний ефект, якщо їх використовувати правильно.
У ЗМІ зараз справжнє «дрон-божевілля» — усі про них говорять, усі ними користуються. На цьому тлі Федеральне авіаційне агентство США (FAA) намагається впровадити чіткі правила щодо експлуатації малих комерційних безпілотників. І це абсолютно логічно — ми всі маємо зробити свої польоти максимально відповідальними, безпечними і контрольованими, наскільки це взагалі можливо.
Іноді найпростіший спосіб вирішити проблему — це правильно сформулювати запитання для тих, хто дійсно розуміється на темі. Спільнота людей, захоплених безпілотниками, — це неоціненне джерело знань, досвіду та підтримки. Завдяки таким однодумцям часто вдається не тільки швидко знайти рішення, а й навчитися чомусь новому.
Найбільш доступною формою взаємодії з іншими ентузіастами є онлайн-форуми, де можна подивитися, як інші люди вирішують схожі завдання або діляться власними напрацюваннями. Один із улюблених ресурсів Террі — це сайт www.rcgroups.com, де користувачі охоче діляться своїм досвідом створення малих БПЛА та розповідають про польоти з ними. Там панує справжня атмосфера підтримки й колективного прогресу.
Проте форумами все не обмежується. Часто виявляється, що поруч із вами діє місцевий авіамодельний клуб, у якому теж є активні користувачі дронів. Вони не лише поділяться знаннями, а й з радістю приймуть нову людину до своєї спільноти. Спробуйте пошук за ключовим словом «drone» на сайтах-агрегаторах або в соцмережах — це допоможе знайти саме таку групу у вашому місті.
Ще одне потужне джерело — Академія авіамоделістів (Academy of Model Aeronautics, AMA), сайт: www.modelaircraft.org. Це найбільша у світі організація, яка об’єднує авіамоделістів з 1936 року. У неї входять тисячі ентузіастів, у тому числі активні групи в Балтиморі та Вашингтоні, які відіграли ключову роль у розвитку руху БПЛА в регіоні. Ми щиро вдячні всім, хто долучається до цих ініціатив.
AMA також підготувала чудовий документ у форматі PDF — найкраще практичне керівництво з безпечного та відповідального управління дронами. Завантажити його можна за цим посиланням: https://www.modelaircraft.org/files/550.pdf
Це справді варто прочитати кожному, хто хоче керувати дронами не тільки з задоволенням, а й з розумінням своєї відповідальності.
Ми переконані, що на появу дронів найбільше вплинули кілька технологічних проривів: радіокеровані моделі літаків, інтегральні мікросхеми, системи навігації (GPS), Інтернет і смартфони. Давайте детальніше розглянемо, як усе починалося.
У 1937 році Росс Галл (Ross Hull) та Клінтон ДеСото (Clinton DeSoto), співробітники Національної асоціації аматорського радіозв’язку США (ARRL — American Radio Relay League), уперше публічно продемонстрували політ моделі літака під радіокеруванням. Улітку й восени того року вони створили планери з розмахом крил понад 4 метри та провели понад сотню успішних польотів у місті Гартфорд, штат Коннектикут.
У процесі роботи Росс Галл самостійно сконструював першу легку бортову апаратуру радіокерування. Йому вдалося значно підвищити ефективність передавача й винайти найлегший на той час одноламповий приймач для моделей літаків.
У 1940-х роках брати-близнюки Вальтер (Walter) і Вільям Гуд (William Good) стали справжніми зірками американського авіамоделізму. Вони перемагали на Національному чемпіонаті США в 1940 і 1947 роках зі своєю легендарною моделлю літака “Guff”. Сьогодні цей історичний літальний апарат експонується в Національному музеї авіації та космонавтики Смітсонівського інституту.

Улітку 1958 року Джек Кілбі (Jack Kilby) — новий співробітник компанії Texas Instruments і водночас молодий винахідник — здійснив справжній прорив в електронній промисловості, представивши свою інтегральну схему. Цей попередник сучасних мікросхем складався з транзистора та кількох інших компонентів, розміщених на шматочку германня розміром 11×1,6 мм.
Зрозумівши, що такі електронні компоненти, як резистори й конденсатори, можна виготовляти з того ж матеріалу, що й транзистори, Кілбі дійшов висновку, що всі ці елементи можуть бути об’єднані в одну завершену схему. Більшість сучасних електронних пристроїв просто не змогли б існувати без цієї простої мікросхеми. Саме вона відкрила шлях до переходу від громіздких комп’ютерів до компактних мікроконтролерів.
У певний момент можливості авіамодельної апаратури досягли межі — її обмежувала як конструкція обладнання, так і характеристики радіосигналу та особливості імпульсного кодування. Щоб подолати ці межі, були потрібні нові технологічні рішення — менш очевидні, але критично важливі для реалізації інтелектуального управління.
Офіційний сайт www.gps.gov визначає GPS так:
«Система глобального позиціонування (Global Positioning System, GPS) — це система, що належить США та забезпечує користувачам послуги навігації, визначення положення й точного часу. Вона складається з трьох сегментів: космічного, сегменту управління та користувацького сегменту. Повітряні сили США розробляють, обслуговують і контролюють як космічний сегмент, так і сегмент управління».
36 супутників системи безперервно передають на Землю потік даних, який містить географічну інформацію та часовий код. Будь-який пристрій із GPS-приймачем може отримувати сигнали принаймні від чотирьох супутників, щоб обчислити власне положення у просторі відносно цих супутників. Пряма видимість між приймачем і супутниками — критично важлива умова. Точність координат значно покращується, якщо доступно більше ніж чотири супутники. Через цю вимогу в приміщеннях часто складно отримати стабільний сигнал для точного визначення місця.
Бум персональних цивільних дронів був би неможливим без Інтернету. Онлайн-магазини, соцмережі та форуми дали людям змогу миттєво спілкуватися, вчитися й купувати необхідне з будь-якої точки світу. Террі створив свій перший квадрокоптер, вивчаючи напрацювання інших користувачів і ставлячи запитання в мережі. Чим розумнішими стають дрони, тим вагомішою буде роль Інтернету в їхньому подальшому застосуванні.
Оскільки розміри процесорів і сенсорів значно зменшились, залишалося тільки придумати, як вбудувати смартфон в авіамодель. Коли ви нахиляєте або обертаєте телефон, інтерфейс автоматично змінює орієнтацію на екрані. Ці ж датчики положення можна використовувати для керування невеликим дроном. Як інженер, який розробляє мобільні застосунки, Террі добре знається на можливостях орієнтаційних систем смартфонів. Наразі він працює над кількома додатками для картографії із застосуванням дронів.

Усі згадані технології — GPS, Інтернет і смартфони — стали основою для появи польотного контролера, фактично «мозку» квадрокоптера. Масове використання автопілотів у цивільних мультикоптерах розпочалося після 2000 року. Перші пристрої з підтримкою GPS випускала німецька компанія MikroKopter, а згодом кілька китайських виробників почали виготовляти їхні копії.
Приблизно в цей же період з’явилися кілька відкритих проєктів, зокрема MultiWii (www.multiwii.com), ArduPilot (www.ardupilot.org) і OpenPilot (www.openpilot.org). Назва MultiWii має цікаве походження: перші контролери були створені з сенсорів, витягнутих із геймпадів Nintendo Wii. Проєкт ArduPilot, як можна здогадатись, спочатку базувався на платформі Arduino.
Станом на сьогодні аматорські автопілоти суттєво еволюціонували. Багато з них підтримують просунуті функції — наприклад, автономний політ, Return to Home (RTH) — повернення до точки старту, та Follow Me — слідування за оператором. Ще кілька років тому такі можливості були доступні лише в найдорожчих моделях. Це яскраво демонструє, як стрімко розвиваються технології.
Наведені нижче датчики, хоча й не є принципово новими розробками, стали досить компактними та легкими, щоб їх можна було використовувати в автопілотах малих БПЛА:
магнітометр — цифровий компас;
гіроскоп — датчик кутових прискорень;
акселерометр — датчик гравітації (лінійних прискорень);
барометр — датчик атмосферного тиску, що вимірює висоту об’єкта.
Усі ці сенсори разом утворюють інерціальну вимірювальну систему (ІВС — Inertial Measurement Unit, IMU).
Механіка польоту ґрунтується на кількох базових законах, які взаємодіють у складний спосіб. Щоб добре це зрозуміти, варто згадати основи фізики Ньютона.
Під поняттям сили мається на увазі найпростіше штовхаюче або тягнуче вплив. Коли всі сили, що діють на об’єкт, урівноважені — тобто сила в одному напрямку дорівнює силі в протилежному — об’єкт залишається нерухомим. Якщо ж сили не врівноважені, об’єкт починає прискорюватись у напрямку більшої сили.
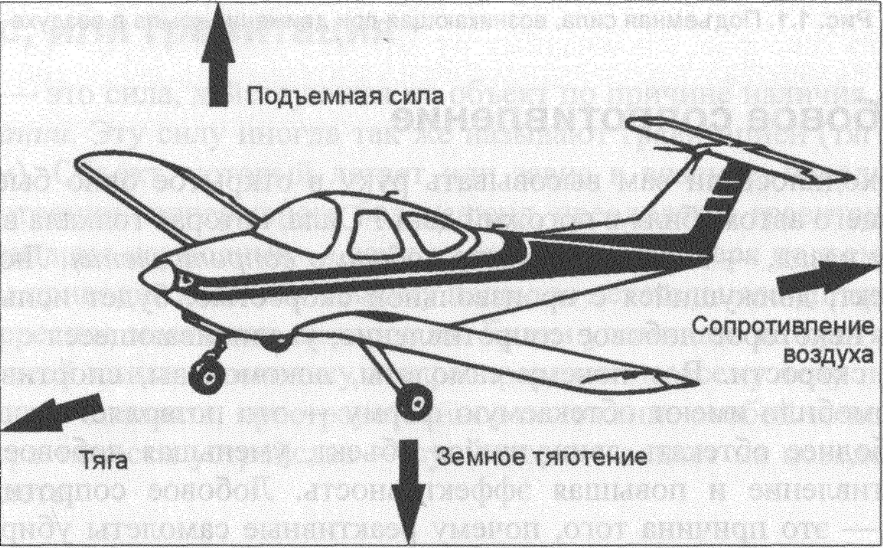
Вага — це сила, яка діє на об’єкт унаслідок гравітації. Її іноді теж називають тяжінням. Летальний апарат, що перебуває в повітрі або зависає на місці, постійно підтримує баланс сил, щоб протидіяти гравітації. Сила тяжіння невблаганна — навіть короткочасна втрата підйомної сили призводить до негайного падіння. Важливий момент, який ми ще неодноразово згадаємо в книзі: оскільки вага розподілена по всьому корпусу апарата, розташування центру ваги істотно впливає на його поведінку в повітрі.
Підйомна сила, що протидіє вазі, — це аеродинамічна сила, яка утримує апарат у повітрі (див. Мал.1). У літальних апаратів із крилами підйомна сила виникає завдяки обтіканню крила повітрям. Потік, що проходить над верхньою частиною крила, рухається швидше, стає більш розрідженим — утворюється зона зниженого тиску. Під крилом повітря рухається повільніше, тиск там вищий. Ця різниця тиску створює підйомну силу, спрямовану знизу вгору, яка й утримує літак у повітрі.
Щоб літак міг висіти або рухатися горизонтально, підйомна сила має дорівнювати вазі. Для підйому — вона повинна перевищувати вагу.

Чи доводилося вам коли-небудь висовувати руку у відкрите вікно автомобіля, що рухається на високій швидкості в ясний день? Сила, яка відштовхує руку назад, є чудовим прикладом лобового опору. Будь-який об’єкт, що рухається з певною швидкістю, стикається з лобовим опором, який зростає зі збільшенням швидкості. Саме тому літаки, локомотиви й спортивні автомобілі мають обтічну форму — це допомагає повітрю вільніше обтікати корпус, зменшуючи опір і підвищуючи ефективність. Лобовий опір — це також причина, чому реактивні літаки прибирають шасі одразу після зльоту. Для квадрокоптерів і дронів це теж може мати значення.
З точки зору аеродинаміки, тяга — це механічна сила, яка забезпечує рух літального апарата в повітрі. Джерелом тяги можуть бути двигуни, пропелери, ракетні прискорювачі, м’язова сила (у птахів) або інші системи приводу. Якщо тяга перевищує лобовий опір, швидкість апарата зростає. Для підтримки руху тяга має бути щонайменше рівною опору. У випадку мультикоптерів тяга має дорівнювати або перевищувати вагу апарата. На Мал.2 показано чотири ключові сили, що впливають на політ.
Більшість безпілотних літальних апаратів керується за допомогою пульта дистанційного керування щонайменше з шістьма каналами, що вже давно стало стандартом для авіамодельної техніки. Такі пульти мають дві основні ручки (джойстики), які можуть рухатися вгору-вниз і вправо-вліво. Крім того, на пульті є набір перемикачів, кнопок і повзунків, кількість і розташування яких залежать від конкретної моделі. Як правило, кожному з цих елементів відповідає окремий канал.
Два головні джойстики — це основні елементи керування, які завжди займають чотири канали, по одному на кожну вісь руху. Окрім цих чотирьох, необхідно ще щонайменше один канал для вибору режиму польоту. Ще один важливий канал — це вмикання функції повернення додому (RTH). Обидва ці канали зазвичай активуються через перемикачі на пульті.
Ми детально розглянемо функцію RTH і режими польоту в наступних розділах, а зараз звернемо увагу на призначення двох основних ручок пульта (див. мал. 3 і 4).
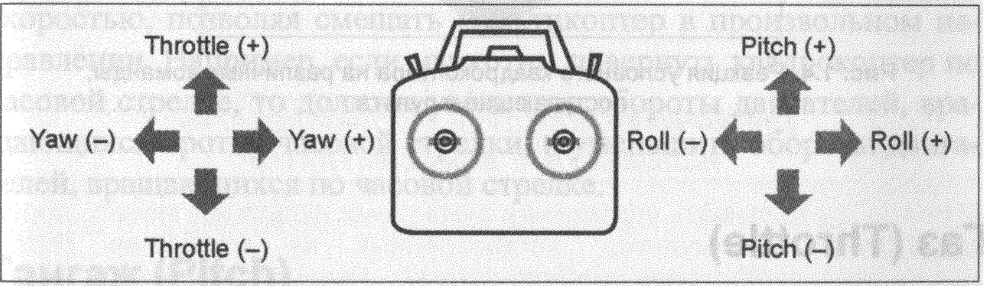
Mode 2, прийнятий у США, є найпоширенішим варіантом. В інших країнах може використовуватись режим Mode 1, у якому функції лівої та правої ручок навпаки — поміняні місцями. У більшості сучасних пультів можна змінити режим у налаштуваннях, але деякі моделі з заводу мають жорстко заданий лише один режим і не дозволяють перемикання.
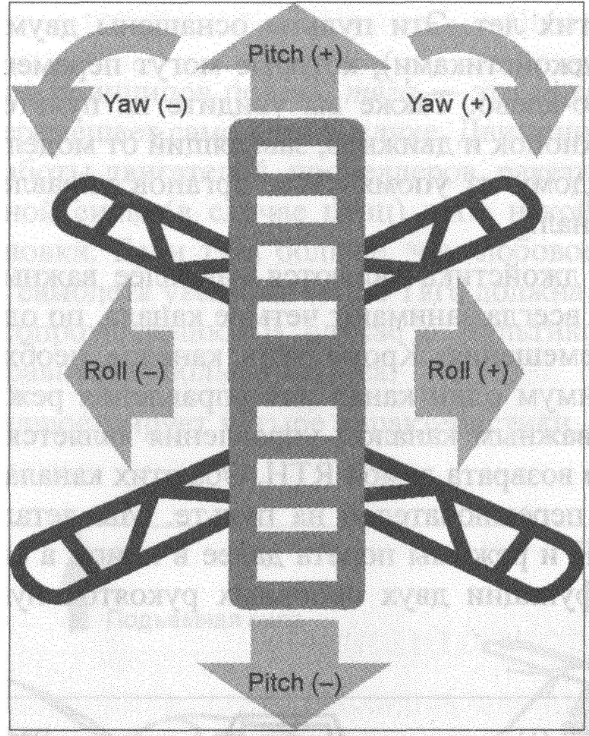
Рух лівої ручки пульта вгору або вниз керує обертами двигунів вашого літального апарата. Це схоже на натискання педалі газу в автомобілі — тому й канал отримав відповідну назву. Як правило, чим більше значення передається по каналу газу, тим швидше обертаються двигуни. Виняток становлять режими автопілота або автономного польоту, про які ми поговоримо пізніше. Щоб коптер завис у повітрі, потрібно задати таку швидкість обертів, яка врівноважує силу тяжіння.
Рух лівої ручки пульта вліво або вправо керує напрямом руху апарата. Цей параметр у авіації називається ричанням (yaw). Канал відповідає за обертання мультикоптера в горизонтальній площині. У літаках це керується через руль напряму (rudder), розташований у хвості. Під час польоту, незалежно від типу апарата, відхилення ручки вбік змінює курс у відповідному напрямку.
Як мультикоптер може змінювати напрямок, якщо в нього немає керма або елеронів, а лише пропелери? Це досягається завдяки зміні вектора тяги. Пропелери обертаються з різною швидкістю, що дозволяє розвертати апарат у потрібну сторону. Наприклад, щоб повернути квадрокоптер за годинниковою стрілкою, слід збільшити оберти двигунів, які обертаються проти годинникової стрілки, і зменшити — тих, що обертаються за годинниковою.
Рух правої ручки пульта вперед або назад керує тангажем — підйомом або опусканням носа апарата. У літаках це відповідає роботі руля висоти, що знаходиться в хвостовій частині. Коли ви штовхаєте ручку вперед — ніс опускається, тягнете назад — піднімається. У квадрокоптерах тангаж досягається зміною загального вектора тяги. Більшість автопілотів мають функцію автовирівнювання, яка обмежує максимальний кут нахилу. В ручному режимі обмеження може бути зняте, що дозволяє виконувати фігури вищого пілотажу, наприклад переворот (flip). Але перш ніж це робити, варто потренуватися.
Рух правої ручки пульта вліво або вправо керує креном — нахилом апарата ліворуч або праворуч відносно курсу польоту. У літаках цей рух забезпечується елеронами, розташованими по краях крил, які відхиляються в протилежні сторони. У мультикоптерах крен створюється шляхом зміни тяги по боках — двигуни з одного боку працюють швидше, з іншого — повільніше, змушуючи апарат нахилитися. Як і у випадку з тангажем, автопілот зазвичай обмежує кут крену, але в ручному режимі це обмеження знімається. Якщо автопілот правильно налаштований, і у вас є досвід, ви можете виконати бокове обертання — аналог фігури “бочка” у пілотажі літаків.
Розпочинати практику керування джойстиками пульта слід якомога раніше — найзручніше це робити за допомогою авіасимулятора, встановленого на комп’ютер . Варто підібрати симулятор, який найбільше відповідає індивідуальним потребам користувача.
Один із прикладів — Phoenix R/C Pro Simulator V5, який застосовувався у літньому таборі ентузіастів квадрокоптерів “Outdoors Maker Camp”. Комплект симулятора включає диск і пульт керування, що підключається до комп’ютера через USB. Існує також чимало мобільних застосунків, серед яких є й безкоштовні — їх можна завантажити без обмежень.
Ще один популярний симулятор — HELI-X, сумісний з комп’ютерами Mac, що робить його зручним для користувачів цієї платформи. Симулятор — цінний інструмент для початківців, який дозволяє відпрацювати навички без ризику пошкодити дороге обладнання. Досвідчені оператори також можуть використовувати його для вдосконалення техніки пілотування.
Наявність можливості тренуватися незалежно від погоди — велика перевага. Практика за симулятором протягом тривалого часу формує м’язову пам’ять, яка допоможе швидко реагувати у складних ситуаціях під час реальних польотів.

