
16.04.2025
28 min
1297

This article is a complete guide for those who want to understand what a drone is, how it works, and how it works. You will learn how a drone differs from other UAVs, what components it contains, how GPS, autopilot, and sensors work, and why these technologies allow the device to fly without human intervention. The material covers the basics of aerodynamics — weight, lift, thrust, and drag, and also explains how a flight controller works, why you need control sticks on the remote control, and what Mode 2 is.

If you are not isolated from the world, then you have probably seen the word “drone” in the news more than once. This word appears in various headlines and can refer to both small radio-controlled models and large combat drones equipped with weapons. The reason is that different sources give the word “drone” different meanings. So the question arises: where does the line lie, and what exactly makes a drone a drone? Let’s start with the basic terms.
The Merriam-Webster dictionary defines the term drone as: “An unmanned aerial vehicle or aircraft that is controlled remotely or by means of an on-board computer.”
This formulation is too broad and often leads to confusion or even misinformation, especially when it comes to specific types of UAVs. To avoid misunderstandings, it is important to clarify: according to expert Terry, the main difference between a simple radio-controlled aircraft and a drone is the presence of GPS systems and an autopilot. That is, as soon as the device is able to maintain its position independently or fly without the participation of a pilot, it is already considered a drone.
In our book, we will adhere to this very approach.
A drone is an unmanned aerial vehicle that is capable of flying autonomously using navigation systems (GPS, inertial systems, sensors, etc.) and an on-board computer. That is, the pilot may not interfere with the flight process at all – the device itself knows where to fly and how to stabilize in the air.
A remotely piloted aircraft (RPA) is any aircraft controlled by an operator from the ground using a remote control, radio channel or other form of communication. Such a device is not capable of operating independently and is completely dependent on human commands.
Unmanned aerial vehicles (UAVs) are a general category that includes both types: both remotely controlled and those that operate autonomously. The main feature is that there is no pilot on board, and control is carried out remotely or through a flight program.
Small avionics systems – this refers to all electronic and software solutions used in unmanned aerial vehicles: autopilots, stabilizers, GPS modules, sensors, processors, communication and data processing systems. These technologies are the brain of the drone.
Whether we like it or not, the word “drone” has become a popular brand in the public space. It is used everywhere – from children’s toys to combat drones. And, frankly, it creates confusion. In this text, we will try to return this term to a clear meaning, show what is really behind these technologies, and explain why small UAVs can have a positive effect if used correctly.
There is a real “drone madness” in the media now – everyone is talking about them, everyone is using them. Against this background, the US Federal Aviation Agency (FAA) is trying to introduce clear rules for the operation of small commercial drones. And this is absolutely logical – we all need to make our flights as responsible, safe and controlled as possible.
Sometimes the easiest way to solve a problem is to ask the right questions to those who really understand the subject. The community of people who are passionate about drones is an invaluable source of knowledge, experience and support. Thanks to such like-minded people, it is often possible not only to quickly find a solution, but also to learn something new.
The most accessible form of interaction with other enthusiasts is online forums, where you can see how other people solve similar problems or share your own developments. One of Terry’s favorite resources is the website www.rcgroups.com, where users willingly share their experience of creating small UAVs and talk about their flights with them. There is a real atmosphere of support and collective progress there.
But forums are not limited to everything. Often it turns out that there is a local model aircraft club near you, which also has active drone users. They will not only share their knowledge, but also be happy to accept a new person into their community. Try searching for “drone” on aggregator sites or social media to find a group in your city.
Another great resource is the Academy of Model Aeronautics (AMA), www.modelaircraft.org. It is the world’s largest model aircraft organization, founded in 1936. It has thousands of members, including active groups in Baltimore and Washington, D.C., who have been instrumental in the development of the UAV movement in the region. We are grateful to everyone who has joined these initiatives.
The AMA has also produced a great PDF document, a best practice guide to flying drones safely and responsibly. You can download it here: https://www.modelaircraft.org/files/550.pdf
This is truly a must-read for anyone who wants to fly drones not only with pleasure, but also with an understanding of their responsibility.
We believe that the emergence of drones was most influenced by several technological breakthroughs: radio-controlled model aircraft, integrated circuits, navigation systems (GPS), the Internet and smartphones. Let’s take a closer look at how it all began.
In 1937, Ross Hull and Clinton DeSoto, employees of the American Radio Relay League (ARRL), first publicly demonstrated the flight of a radio-controlled model aircraft. In the summer and fall of that year, they built gliders with wingspans of over 13 feet and conducted over a hundred successful flights in Hartford, Connecticut.
In the process, Ross Hull independently designed the first lightweight radio-controlled airborne equipment. He managed to significantly increase the efficiency of the transmitter and invent the lightest single-tube receiver for model aircraft at that time.
In the 1940s, twin brothers Walter and William Good became the stars of American model aircraft. They won the U.S. National Championship in 1940 and 1947 with their legendary model airplane, the “Guff.” Today, this historic aircraft is on display at the Smithsonian Institution’s National Air and Space Museum.

In the summer of 1958, Jack Kilby, a new employee at Texas Instruments and a young inventor, made a real breakthrough in the electronics industry by introducing his integrated circuit. This predecessor of modern microcircuits consisted of a transistor and several other components placed on a piece of germanium measuring 11×1.6 mm.
Realizing that electronic components such as resistors and capacitors could be made from the same material as transistors, Kilby concluded that all these elements could be combined into one complete circuit. Most modern electronic devices simply could not exist without this simple microcircuit. It was she who opened the way for the transition from bulky computers to compact microcontrollers.
At some point, the capabilities of model aircraft equipment reached their limits – it was limited by both the design of the equipment and the characteristics of the radio signal and the peculiarities of pulse coding. To overcome these limits, new technological solutions were needed — less obvious, but critically important for the implementation of intelligent management.
Official website www.gps.gov defines GPS as:
“The Global Positioning System (GPS) is a system owned by the United States that provides users with navigation, positioning, and precise timing services. It consists of three segments: the space segment, the control segment, and the user segment. The United States Air Force develops, maintains, and controls both the space segment and the control segment.”
The system’s 36 satellites continuously transmit a data stream to Earth that contains geographic information and a time code. Any device with a GPS receiver can receive signals from at least four satellites to calculate its position in space relative to these satellites. Direct visibility between the receiver and the satellites is a critical requirement. The accuracy of coordinates is greatly improved if more than four satellites are available. Because of this requirement, it is often difficult to obtain a stable signal indoors for precise location determination.
The boom in personal civilian drones would not have been possible without the Internet. Online stores, social networks and forums have allowed people to instantly communicate, learn and buy what they need from anywhere in the world. Terry created his first quadcopter by studying the work of other users and asking questions online. The smarter drones become, the more important the role of the Internet will be in their future use.
Since the size of processors and sensors has significantly decreased, it was only necessary to figure out how to integrate a smartphone into a model aircraft. When you tilt or rotate the phone, the interface automatically changes orientation on the screen. These same position sensors can be used to control a small drone. As an engineer who develops mobile applications, Terry is well versed in the capabilities of smartphone orientation systems. He is currently working on several applications for mapping using drones.

All of the aforementioned technologies — GPS, the Internet, and smartphones — became the basis for the emergence of the flight controller, effectively the “brain” of a quadcopter. The widespread use of autopilots in civilian multicopters began after 2000. The first GPS-enabled devices were produced by the German company MikroKopter, and later several Chinese manufacturers began to produce copies of them.
Around the same time, several open source projects emerged, including MultiWii (www.multiwii.com), ArduPilot (www.ardupilot.org), and OpenPilot (www.openpilot.org). The name MultiWii has an interesting origin: the first controllers were created from sensors extracted from Nintendo Wii gamepads. The ArduPilot project, as you might guess, was originally based on the Arduino platform.
Today, amateur autopilots have evolved significantly. Many of them support advanced features such as autonomous flight, Return to Home (RTH), and Follow Me. A few years ago, such features were available only in the most expensive models. This clearly demonstrates how rapidly technology is developing.
The following sensors, while not fundamentally new developments, have become compact and lightweight enough to be used in autopilots of small UAVs:
magnetometer – digital compass;
gyroscope – angular acceleration sensor;
accelerometer – gravity sensor (linear acceleration);
barometer – atmospheric pressure sensor that measures the height of an object.
All these sensors together form an inertial measurement system (IMU).
The mechanics of flight are based on several basic laws that interact in complex ways. To understand this well, it is worth recalling the basics of Newtonian physics.
The concept of force refers to the simplest push or pull effect. When all the forces acting on an object are balanced — that is, the force in one direction is equal to the force in the opposite direction — the object remains stationary. If the forces are unbalanced, the object begins to accelerate in the direction of the greater force.
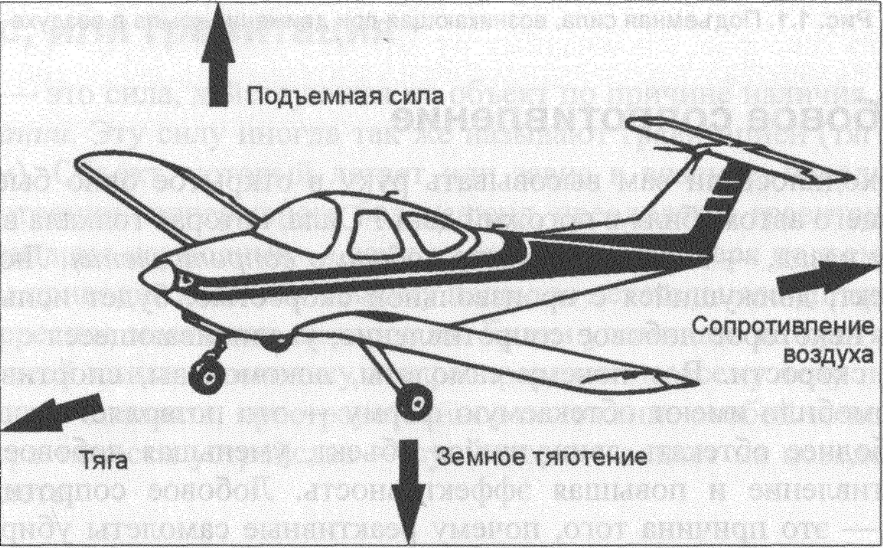
Weight is the force that acts on an object due to gravity. It is sometimes also called gravity. An aircraft in the air or hovering in place constantly maintains a balance of forces to counteract gravity. The force of gravity is relentless – even a brief loss of lift leads to an immediate fall. An important point that we will mention repeatedly in the book: since the weight is distributed throughout the body of the aircraft, the location of the center of gravity significantly affects its behavior in the air.
The lift force that counteracts weight is the aerodynamic force that keeps the aircraft in the air (see Fig. 1). In aircraft with wings, lift is created by the air flowing around the wing. The flow passing over the upper part of the wing moves faster, becomes more rarefied – a zone of reduced pressure is formed. Under the wing, the air moves more slowly, the pressure there is higher. This pressure difference creates a lift force, directed from the bottom up, which keeps the plane in the air.
For a plane to hover or move horizontally, the lift force must equal the weight. For lift, it must exceed the weight.

Have you ever stuck your hand out the open window of a car moving at high speed on a clear day? The force that pushes your hand back is a great example of drag. Any object moving at a certain speed encounters drag, which increases as the speed increases. This is why airplanes, locomotives, and sports cars are streamlined—it helps air flow more freely around the body, reducing drag and increasing efficiency. Drag is also the reason why jets retract their landing gear immediately after takeoff. It can also be important for quadcopters and drones.
In aerodynamics, thrust is the mechanical force that keeps an aircraft moving through the air. Thrust can come from engines, propellers, rocket boosters, muscle power (in birds), or other propulsion systems. If the thrust exceeds the drag, the speed of the aircraft increases. To maintain motion, the thrust must be at least equal to the drag. In the case of multicopters, the thrust must equal or exceed the weight of the aircraft. Figure 2 shows the four key forces that affect flight.
Most drones are controlled by a remote control with at least six channels, which has long been the standard for model aircraft. Such remote controls have two main handles (joysticks) that can move up and down and left and right. In addition, the remote control has a set of switches, buttons, and sliders, the number and location of which depend on the specific model. As a rule, each of these elements corresponds to a separate channel.
The two main joysticks are the main control elements, which always occupy four channels, one for each axis of movement. In addition to these four, at least one more channel is required to select the flight mode. Another important channel is the activation of the return-to-home (RTH) function. Both of these channels are usually activated via switches on the remote control.
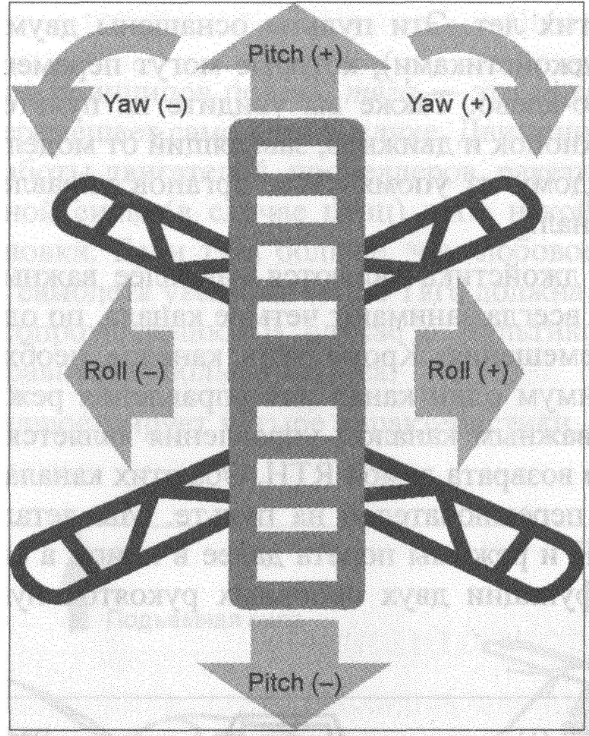
We will look at the RTH function and flight modes in detail in the following sections, but now let’s pay attention to the purpose of the two main knobs of the remote control (see Fig. 3 and 4).
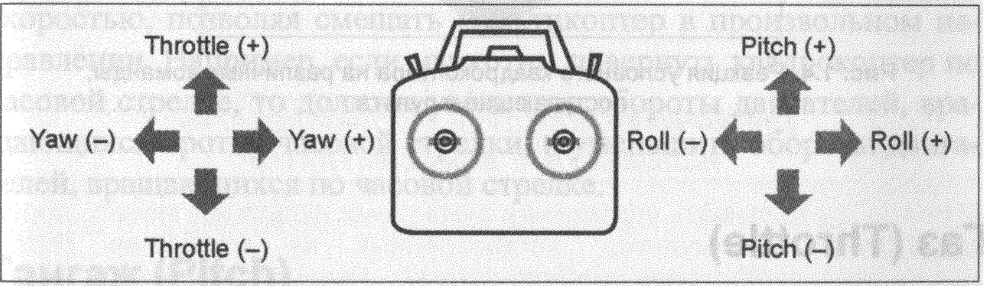
Mode 2, adopted in the USA, is the most common option. In other countries, Mode 1 may be used, in which the functions of the left and right sticks are reversed — swapped. Most modern remotes allow you to change the mode in the settings, but some models are hard-coded from the factory to only one mode and do not allow switching.
Moving the left stick of the remote control up or down controls the speed of your aircraft’s engines. This is similar to pressing the gas pedal in a car – hence the name of the channel. As a rule, the higher the value transmitted through the throttle channel, the faster the engines spin. The exceptions are autopilot or autonomous flight modes, which we will discuss later. In order for the copter to hover in the air, you need to set a speed that balances the force of gravity.
Moving the left stick of the remote control left or right controls the direction of movement of the aircraft. This parameter is called yaw in aviation. The channel is responsible for the rotation of the multicopter in the horizontal plane. In airplanes, this is controlled via the rudder located in the tail. During flight, regardless of the type of aircraft, moving the stick sideways changes the course in the corresponding direction.
How can a multicopter change direction if it has no rudder or ailerons, but only propellers? This is achieved by changing the thrust vector. The propellers rotate at different speeds, which allows you to turn the aircraft in the desired direction. For example, to turn the quadcopter clockwise, you need to increase the speed of the motors that rotate counterclockwise and decrease those that rotate clockwise.
Moving the right stick of the remote control forward or backward controls the pitch – raising or lowering the nose of the aircraft. In airplanes, this corresponds to the operation of the elevator, which is located in the tail. When you push the stick forward – the nose goes down, pull it back – it goes up. In quadcopters, pitch is achieved by changing the overall thrust vector. Most autopilots have an autoleveling function, which limits the maximum angle of inclination. In manual mode, the restriction can be removed, allowing you to perform aerobatics, such as flips. But before doing this, it is worth practicing.
Moving the right stick of the remote control to the left or right controls the roll – the tilt of the aircraft to the left or right relative to the flight path. In airplanes, this movement is provided by ailerons located at the edges of the wings, which deflect in opposite directions. In multicopters, roll is created by changing the thrust on the sides – the engines on one side work faster, on the other – slower, forcing the aircraft to tilt. As in the case of pitch, the autopilot usually limits the angle of roll, but in manual mode this restriction is removed. If the autopilot is set up correctly and you have experience, you can perform a lateral rotation – an analogue of the “barrel” figure in airplane aerobatics.
It is best to start practicing remote control joysticks as early as possible – the most convenient way to do this is with a flight simulator installed on your computer. It is worth choosing a simulator that best suits your individual needs.
One example is the Phoenix R/C Pro Simulator V5, which was used at the “Outdoors Maker Camp” summer camp for quadcopter enthusiasts. The simulator kit includes a disk and a remote control that connects to your computer via USB. There are also many mobile applications, some of which are free – you can download them without restrictions.
Another popular simulator is HELI-X, which is compatible with Mac computers, which makes it convenient for users of this platform. The simulator is a valuable tool for beginners, allowing you to practice skills without the risk of damaging expensive equipment. Experienced operators can also use it to improve their piloting technique.
The ability to train regardless of the weather is a big advantage. Practicing on a simulator over a long period of time builds muscle memory that will help you react quickly in difficult situations during real flights.

