27.09.2025
2 хв
723

PiKVM v2 — це доступний і гнучкий спосіб організувати віддалене керування сервером або персональним комп’ютером на рівні BIOS. Завдяки можливостям KVM over IP ви отримуєте повний контроль над системою, навіть якщо вона не завантажується. Пристрій базується на Raspberry Pi, що робить його компактним, бюджетним та енергоефективним. Зібравши PiKVM v2 своїми руками, можна отримати функціональність дорогих апаратних рішень: перегляд консолі в реальному часі, емуляція клавіатури й миші, завантаження з образів ISO та моніторинг стану обладнання. Це рішення стане у пригоді системним адміністраторам, девопсам і всім, хто хоче мати постійний доступ до свого сервера без додаткових витрат.
KVM over IP (Keyboard, Video, Mouse over IP) – це технологія, яка дозволяє віддалено отримувати доступ до комп’ютера або сервера та керувати ним через мережеве підключення. Вона дає можливість працювати з консоллю сервера або ПК так, якби ви знаходилися прямо перед ним, незалежно від вашого розташування.
Апаратний пристрій. KVM over IP зазвичай є окремим пристроєм, що встановлюється на сервер або інтегрований в його апаратну частину. Воно підключається до портів клавіатури, відео та миші сервера.
Мережеве підключення. Потім пристрій KVM over IP підключається до мережі, що забезпечує віддалений доступ до сервера.
Програмне забезпечення. Користувач отримує доступ до консолі сервера віддалено за допомогою спеціалізованого програмного забезпечення, що надається виробником пристрою KVM over IP. Це ПЗ дозволяє бачити екран сервера, керувати введенням з клавіатури та миші та взаємодіяти з сервером так, ніби ви працюєте за ним безпосередньо.
Функції безпеки. Рішення KVM over IP, як правило, оснащені засобами захисту – шифруванням та автентифікацією, які забезпечують безпечний віддалений доступ до сервера.
Доступ на низький рівень. KVM over IP надає доступ до консолі сервера на низькому рівні, дозволяючи працювати з ним на етапі BIOS і в процесі завантаження. Такий рівень доступу недоступний для програмних рішень віддаленого робочого столу, що працюють лише в середовищі операційної системи.
Незалежність від операційної системи. Оскільки KVM over IP працює на апаратному рівні, він не залежить від операційної системи сервера. Це означає, що адміністратор може керувати та діагностувати сервер навіть тоді, коли ОС зависла або працює з помилками.
Позасмугове управління (out-of-band management, далі – OOB-управління). KVM over IP підтримує позасмугове керування , дозволяючи адміністраторам підключатися до сервера та керувати ним навіть у разі збою ОС або недоступності основного мережевого стека. Це критично важливо для діагностики та обслуговування.
Продуктивність. Пристрої KVM over IP можуть забезпечувати стабільнішу роботу в умовах збою ОС або драйверів у порівнянні з програмними рішеннями, оскільки вони функціонують на апаратному рівні. Однак за якістю відео та затримкою вони зазвичай поступаються сучасним програмним рішенням віддаленого робочого столу.
Відсутність необхідності встановлення ПЗ. Так як KVM over IP є апаратним рішенням, на стороні сервера не потрібно встановлення додаткового програмного забезпечення, що спрощує використання та подальше обслуговування.
Огляд апаратних рішень
На ринку представлено безліч пристроїв KVM over IP, але для особистого використання вони мають ряд недоліків. Ключові з них:
Вартість: комерційні апаратні KVM-рішення зазвичай вимагають більш високих початкових витрат у порівнянні з open-source варіантами, оскільки часто включають додаткові функції та послуги підтримки.
Невільне ПЗ: більшість KVM-комутаторів, розрахованих на промислову експлуатацію в серверних та ЦОДах критичної інфраструктури, поставляються із закритим програмним забезпеченням за пропрієтарною ліцензією.
Найкраще рішення для домашнього стенду/міні-серверного або віддаленого керування ПК — PiKVM: відкрите та недороге IP-KVM-рішення на базі одноплатного комп’ютера Raspberry Pi (ARM).
Пристрій PiKVM підтримує безліч корисних функцій для керування дистанційною машиною, наприклад:
емуляція накопичувача: дозволяє підключати локальний файл *.iso до віддаленого комп’ютера і тим самим встановлювати заново будь-яку ОС віддалено;
емуляція підключення/відключення USB-пристроїв;
керування живленням ATX (опціонально; потрібен ATX-модуль/плата та підключення до кнопки живлення/материнської плати).
Якщо ви хочете придбати пристрій PiKVM, є два варіанти:
замовити готовий пристрій на офіційному сайті;
купити підтримувану плату Raspberry Pi та необхідні компоненти та зібрати пристрій самостійно.
Оскільки доставка готових PiKVM v2 недоступна в деяких країнах, оптимальним рішенням стає самостійна збірка. Такий DIY-підхід забезпечує більшу гнучкість: дозволяє зібрати пристрій під необхідні функції та підібрати будь-які компоненти.
Вивчення офіційної документації PiKVM показує, що для DIY-складання найбільш підходить версія PiKVM v2. Попри наявність сучасної версії PiKVM v3, яка постачається у вигляді готових пристроїв і відрізняється розширеним функціоналом, версія v2 залишається надійним і популярним вибором для самостійного складання. Для реалізації проєкту зазвичай застосовують такі комплектуючі:
1 x Raspberry Pi 4 Model B з 2 ГБ ОЗУ
1 × блок живлення 5.1 В/3 А (офіційний Raspberry Pi PSU або еквівалент) + короткий USB-C кабель із низьким опором
1 x USB-карта захоплення HDMI (сумісна з PiKVM, наприклад, на чіпі MS2109)
1 x SD-карта Kingston 32 ГБ, клас 102 x кабелі USB-A → USB-C (для виготовлення кастомного кабелю живлення)
1 x HDMI-кабель (штекер-штекер)
1 x вентилятор 80 мм (для активного охолодження)

Щоб керувати віддаленою машиною за допомогою нашого DIY-KVM, комп’ютер повинен розпізнавати пристрій як USB-HID (Human Interface Device) – тобто як звичайну клавіатуру або мишу (клавіатура та миша комп’ютера – це також HID-пристрої).
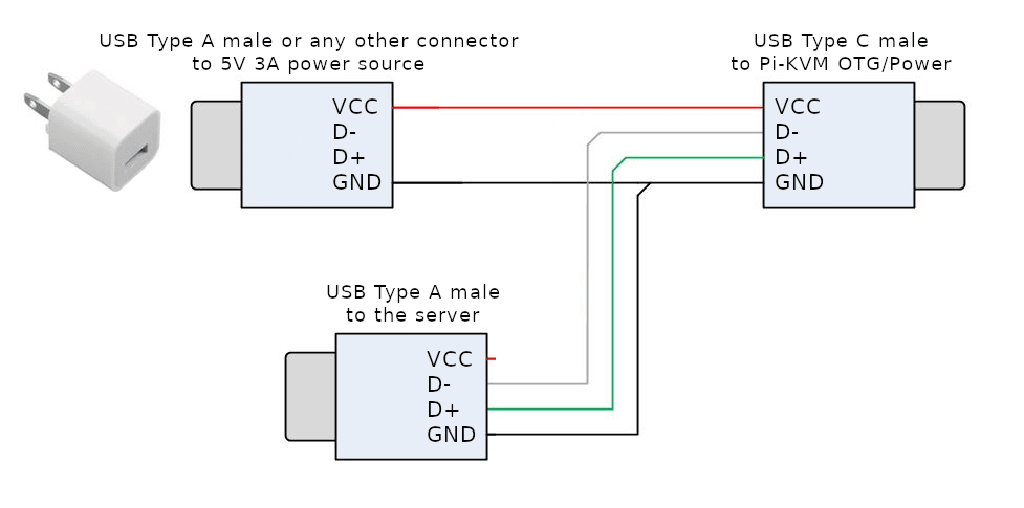
Проблема плати Raspberry Pi 4 Model B в тому, що має тільки один порт USB-C, здатний працювати як HID-пристрій, і цей же порт використовується для живлення. Щоб обійти це обмеження, потрібно виготовити спеціальний кабель, який одночасно виступатиме USB-пристроєм для цільового хоста та отримуватиме зовнішнє живлення від адаптера.
Для виготовлення такого кабелю потрібні 2 кабелі USB-A (штекер) → USB-C (штекер). Рекомендуэмо вибирати якісні кабелі, оскільки платі потрібно живлення струмом до 3 А.
Процес складання включає наступні кроки:
Візьміть перший кабель і обережно зніміть зовнішню оболонку. Залиште провідники ліній даних (зелений та білий) незайманими, а дроти живлення +5 В (червоний) та «землі» (чорний) — переріжте.
Візьміть другий кабель і відріжте його повністю — потрібна лише частина USB-A.
Спаяйте провід +5 В (червоний) частини з другим USB-A з проводом +5 В (червоний) частини з USB-C.
Спаяйте разом всі три дроти «землі» (чорні) від усіх частин кабелю.
Ізолюйте всі з’єднання за допомогою термозбіжних трубок (або якісної ізоленти, якщо немає термоусадки).
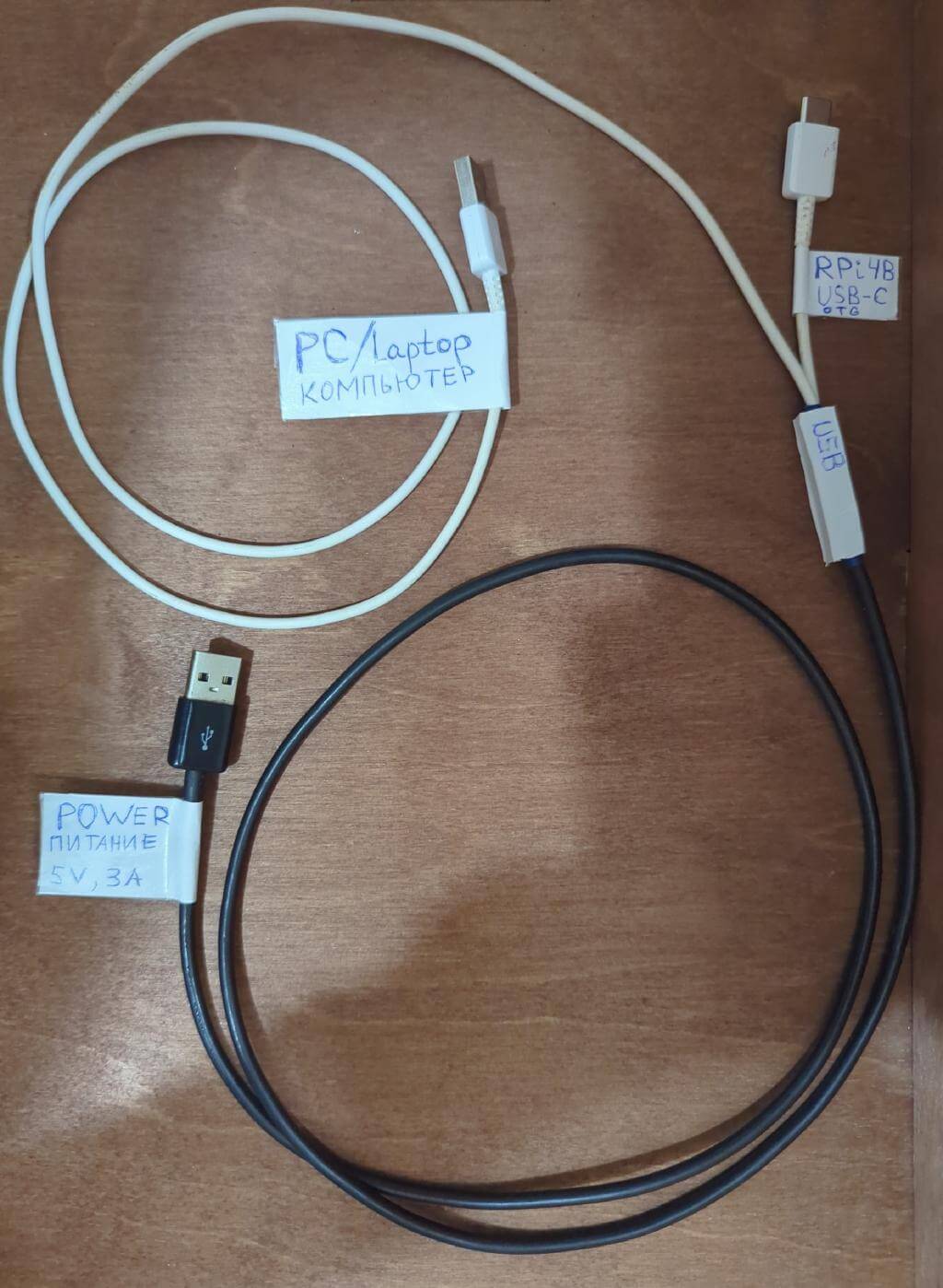
У результаті роз’єм USB-C підключається до плати Raspberry Pi, роз’єм USB-A другого кабелю (з підведеним живленням) – до мережного адаптера, а USB-A роз’єм першого кабелю (з лініями даних) – до ПК, яким ви хочете керувати. Для наочності нижче наведено схему паяння кабелю.
Також рекомендуемо відео на YouTube від розробника PiKVM, де показано весь процес виготовлення такого кабелю.
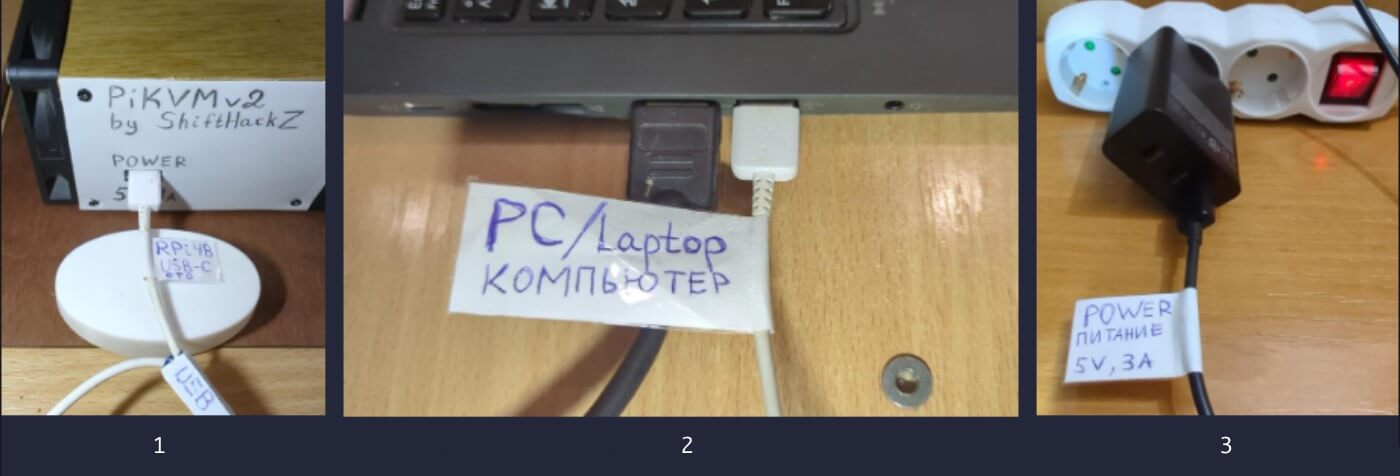
На фото зображений зібраний кабель із підписаними кінцями, що дозволяє уникнути плутанини під час підключення. Чорний роз’єм USB-A під’єднується до адаптера живлення, білий роз’єм USB-A – до комп’ютера, а роз’єм USB-C – до плати Raspberry Pi.
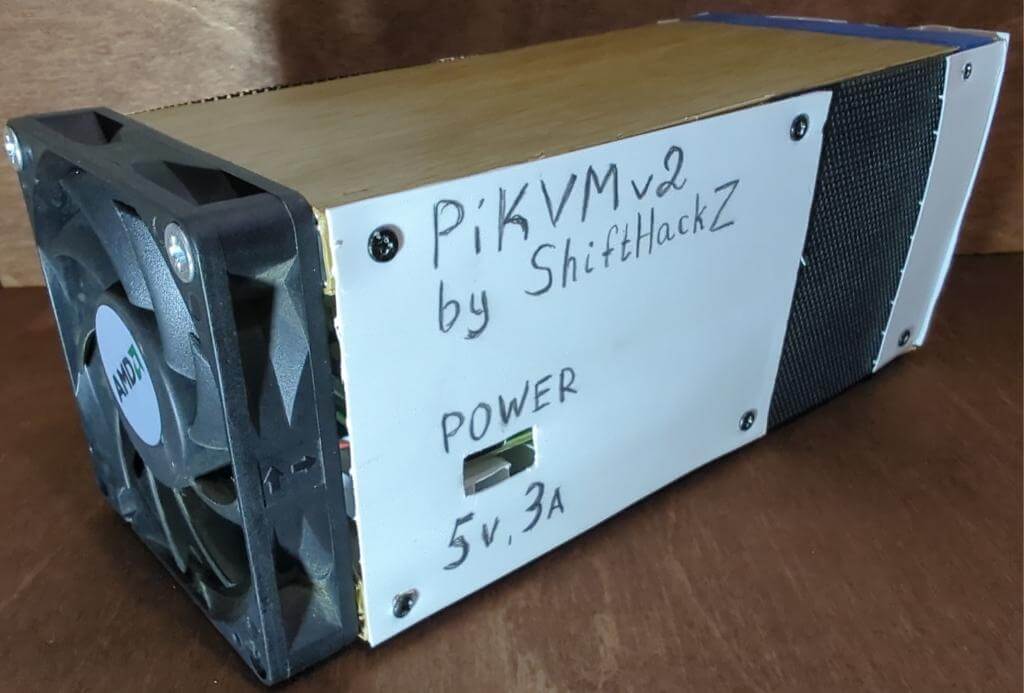
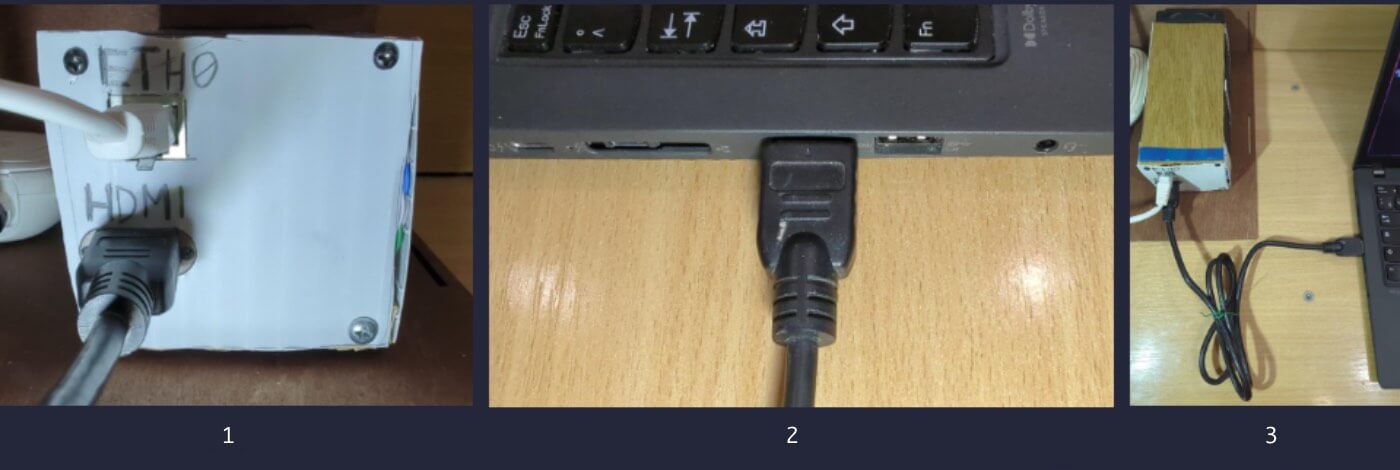
Серед компонентів для складання використовується зовнішня карта захоплення HDMI-відеосигналу, яку необхідно підключати до будь-якого USB 3.0 порту Raspberry Pi (сині роз’єми), оскільки вони рівнозначні за пропускною здатністю. Через це офіційний корпус Raspberry Pi не завжди є вдалим рішенням: він може виявитися надто дорогим і незручним для частих підключень. Оптимальним варіантом у таких випадках стає використання єдиного саморобного корпусу, що забезпечує портативність і формат „plug-and-play“ – достатньо під’єднати лише HDMI- та USB-кабелі для роботи з іншим ПК.
Відомо, що плати Raspberry Pi схильні до перегрівання при екстремальному навантаженні на CPU або під час цілодобової роботи. Щоб уникнути цього, доцільно передбачити активне охолодження з вентилятором 80 мм. Для компактних збірок підійдуть готові корпуси з радіаторами та вентиляторами меншого діаметра (30–40 мм), яких цілком достатньо для Raspberry Pi 4 при тривалому навантаженні.
За відсутності 3D-принтера для виготовлення корпусу, подібного до заводського, можливим рішенням є ручне створення оболонки із доступних матеріалів, наприклад старих пластикових панелей. Такий підхід дозволяє досягти функціональності навіть без спеціалізованого обладнання.

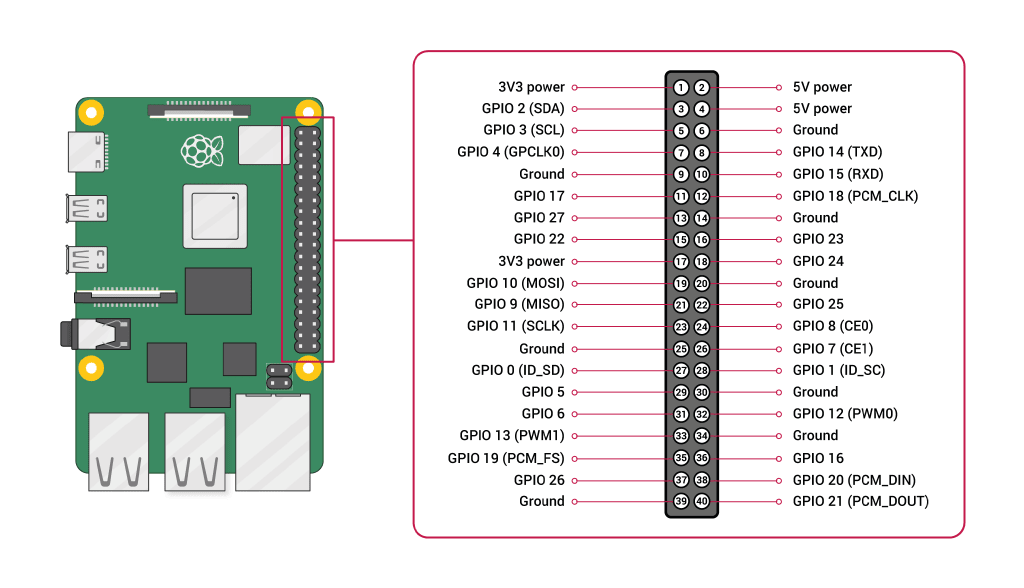
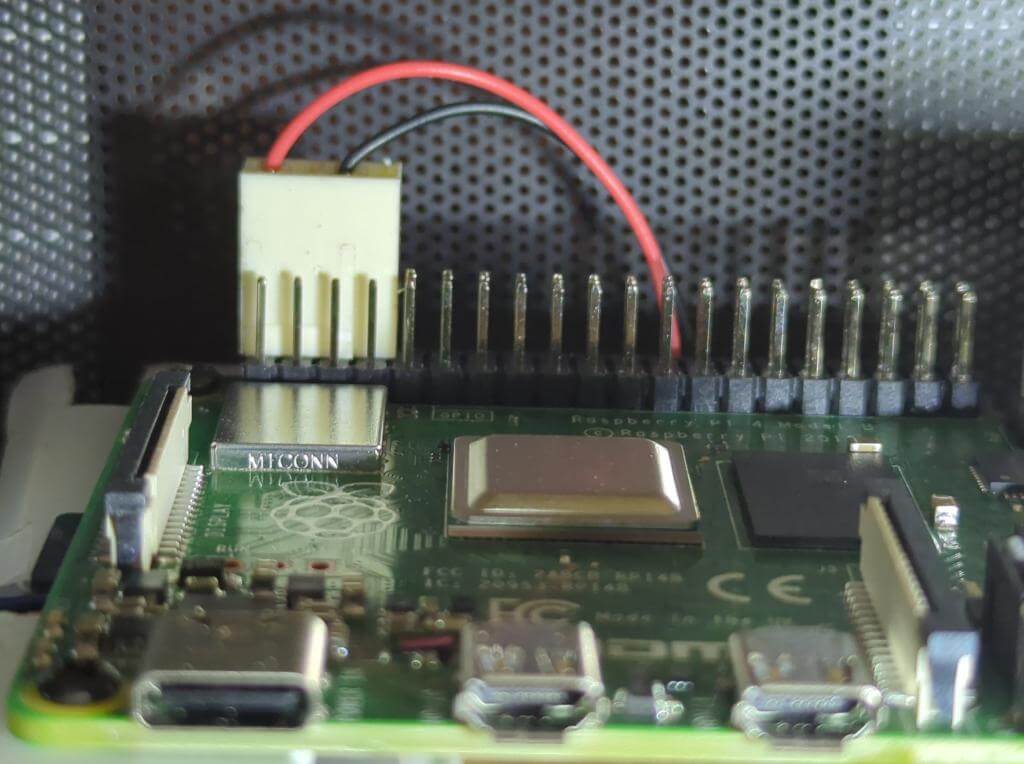
Вентилятор підключається до відповідних GPIO-пін на платі. Для живлення зазвичай застосовується контакт №2 для +5 В (червоний провід) і контакт №6 для «землі» (чорний провід).
Я використовував штатний роз’єм вентилятора, але довелося розмістити контакти в ньому правильно.
На бічній панелі виведено подовжений роз’єм Ethernet RJ-45, який всередині підключається до штатного порту Raspberry Pi. Такий підхід обрано для зручності, оскільки провідне з’єднання забезпечує стабільніший стрим із низькою затримкою порівняно з Wi-Fi. Для реалізації використано подовжувач, роз’єм встановлено поряд із входом HDMI.

Щоб Raspberry Pi міг працювати як апаратний пристрій KVM, необхідно записати на SD-карту образ операційної системи PiKVM OS.
Підходящий образ PiKVM OS для конкретної моделі Raspberry Pi можна знайти на сторінці PiKVM Flashing OS. Для цоьго був скачан образ „DIY PiKVM V2 Platform, Raspberry Pi 4 для USB Dongle“, оскільки він відповідає моєму обладнанню (Raspberry Pi 4 Model B та USB-карта захоплення HDMI). На 2025 серійна лінійка зосереджена на PiKVM V4 (Mini/Plus); DIY-варіант V2 залишається підтримуваним. Для нового складання орієнтуйтесь на актуальні образи та інструкції на офіційному сайті.
Для запису зображення на карту SD використовується програма Raspberry Pi Imager. Оскільки будемо використовувати Arch Linux, встановив її з офіційного пакету rpi-imager:
sudo pacman -S rpi-imager
Далі необхідно підключити картку SD до комп’ютера. Якщо пристрій не оснащений вбудованим картридером, можна скористатися перехідником microSD → USB-A.

Щоб записати завантажений образ, виконайте такі кроки:
1. Відкрийте Raspberry Pi Imager.
2. Натиснути «Choose device» та вибрати модель плати Raspberry Pi. Наприклад, для цього проєкту підходить Raspberry Pi 4.
3. Натисніть “Choose OS”, прокрутіть вниз і виберіть опцію “Use custom image”. У файловому діалозі вкажіть завантажений образ PiKVM.
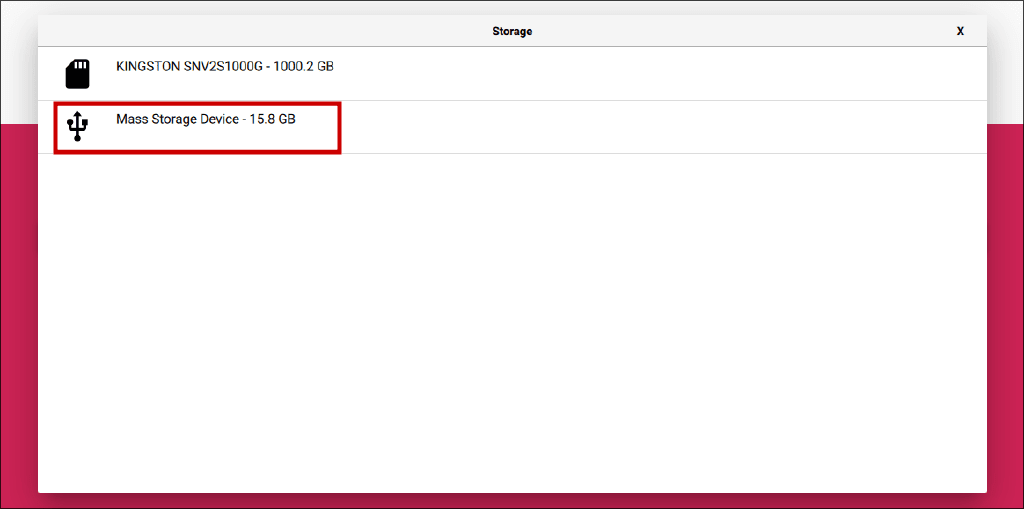
4. Натисніть «Choose storage» та виберіть картку SD. Будьте уважні: RPI Imager відформатує вибраний носій.
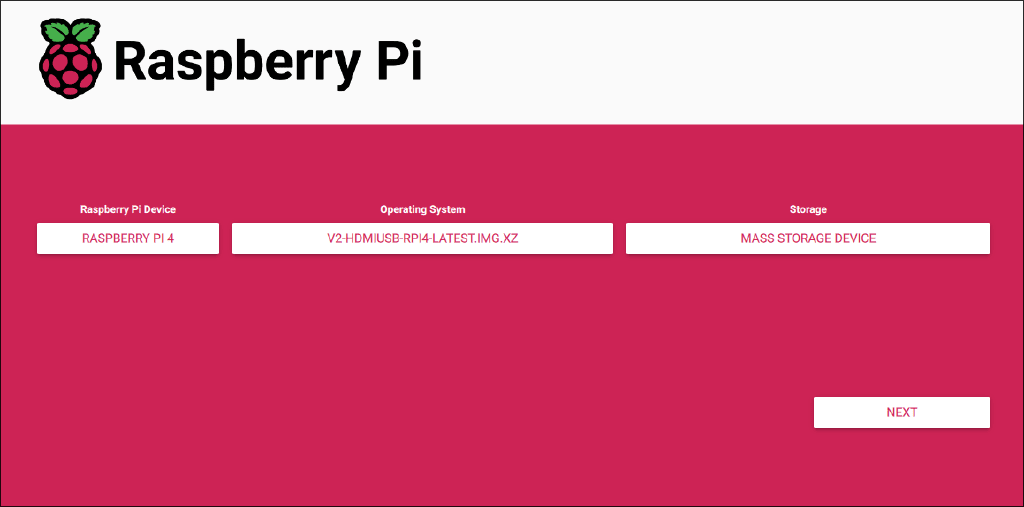
5. Переконайтеся, що всі поля заповнені коректно, а потім натисніть «next».
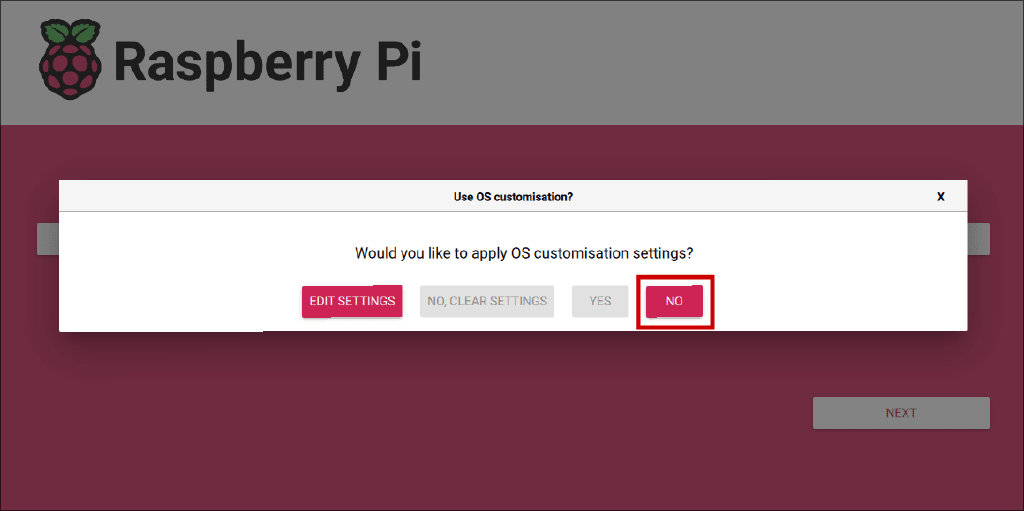
6. З’явиться вікно із пропозицією налаштувати параметри образу (OS customization). Якщо хочете, можете одразу включити SSH і задати hostname. Якщо додаткових параметрів не потрібно, натисніть „NO“.
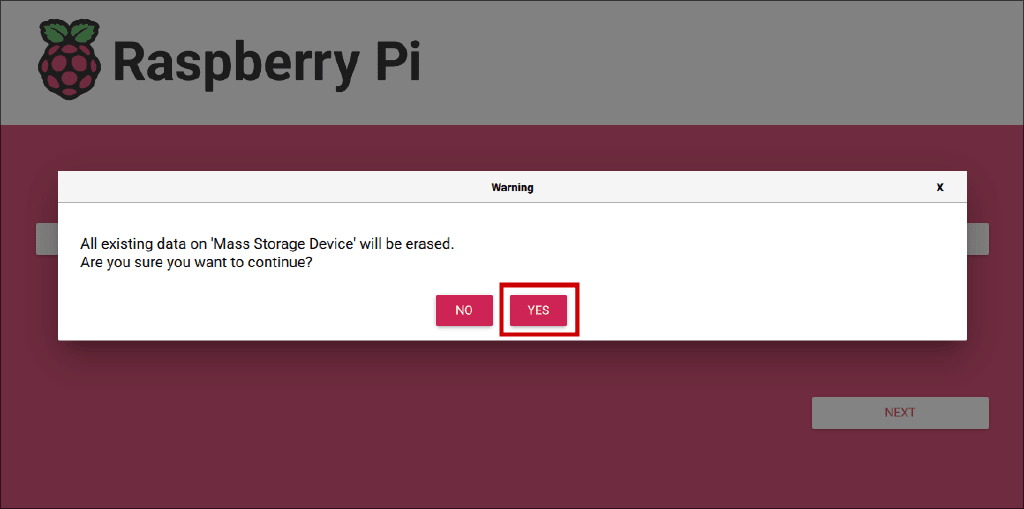
7. Підтвердьте процес запису та зачекайте, поки RPI Imager завершить запис та перевірку (валідацію) образу.
Найкраще використовувати інтернет-підключення через Ethernet RJ-45, адже воно надійніше та забезпечує вищу якість відеопотоку з меншою затримкою порівняно з Wi-Fi. Водночас у випадку, коли пристрій планується застосовувати як портативний і підключати до різних ПК або ноутбуків, можливість під’єднання Ethernet може бути відсутня. У такій ситуації доцільно заздалегідь налаштувати параметри Wi-Fi для точки доступу Mobile Hotspot на смартфоні. Це дає змогу при завантаженні Raspberry Pi без кабелю Ethernet автоматично використовувати вбудований Wi-Fi-адаптер і підключатися до смартфона.
1. Підключіть картку SD до комп’ютера.
2. Ви побачите, що у SD-карти кілька розділів. Потрібно відкрити перший розділ під назвою „PIBOOT“ (він визначається як окремий диск під час підключення картки).
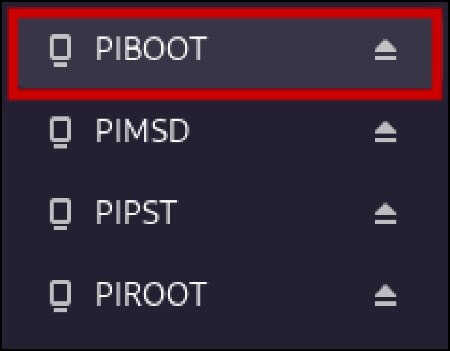
3. Знайдіть файл pikvm.txt у кореневій папці розділу «PIBOOT». Якщо немає файлу — створіть його вручну; якщо файл вже існує, нічого не видаляйте: в кінці потрібно додати 2 параметри.
4. Додайте 2 параметри до кінця файлу. Замініть значення у прикладі на ваші облікові дані Wi-Fi.
WIFI_ESSID=my_wifi_network WIFI_PASSWD=the_most_secure_password_ever
5. Збережіть файл. Потім коректно розмонтуйте розділ та вийміть картку SD. Вставте картку SD у плату.
Це важливий крок: під час першого запуску PiKVM OS ініціалізує необхідні налаштування та генерує унікальні SSH-ключі та сертифікати безпеки.
Кроки першого запуску:
Встановіть SD-карту із записаною PiKVM OS у плату Raspberry Pi.
Підключіть плату Raspberry Pi до роутера за допомогою кабелю Ethernet RJ-45. Під час першого запуску можна використовувати як Ethernet, і заздалегідь налаштований Wi-Fi. Головне — переконатися, що вибрана мережа є доступною, інакше пристрій не підключиться.
Завантажте плату Raspberry Pi. Для цього підключіть до порту USB-C джерело живлення 5В3А.

4. Зачекайте, поки PiKVM OS завершить первинну ініціалізацію. Процес може тривати до 10 хвилин.
ВАЖЛИВО: не відключайте живлення плати Raspberry Pi до завершення первинної ініціалізації.
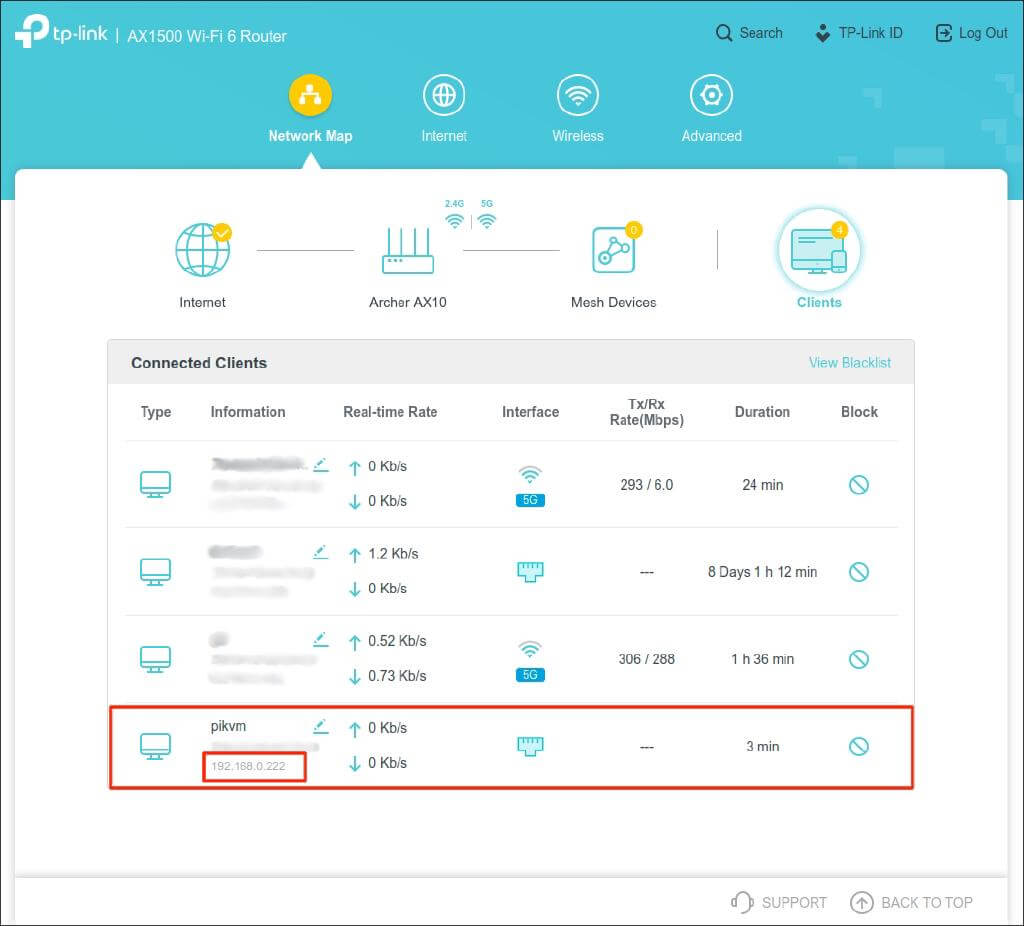
5. Після першого запуску пристрій PiKVM підключиться до мережі та отримає локальну IP-адресу у вашій локальній мережі (LAN) роутера. Щоб дізнатися, яка IP-адреса отримала PiKVM, зайдіть у панель адміністрування роутера і перегляньте список підключених пристроїв.
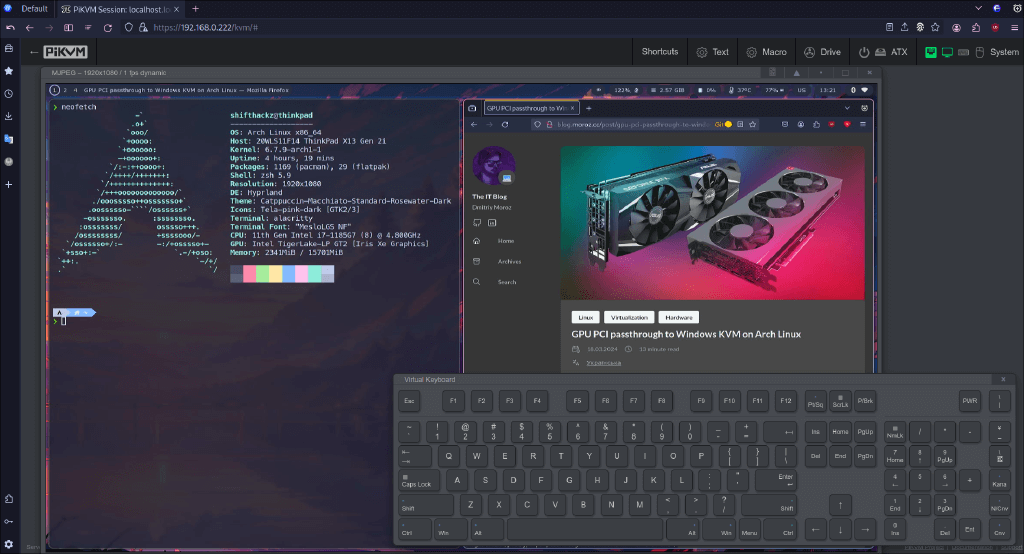
У наведеному прикладі плата отримала IP-адресу 192.168.0.222. У реальних умовах IP-адреса може відрізнятися залежно від конкретної мережі.
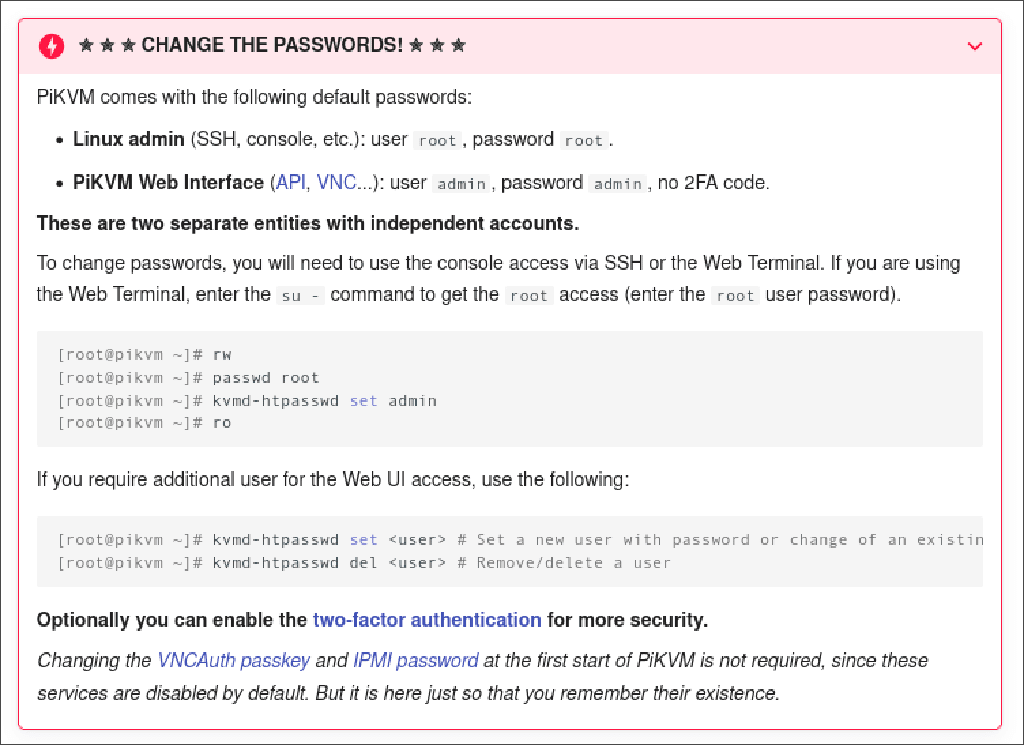
6. Далі вам знадобиться комп’ютер або смартфон, підключений до тієї ж локальної мережі, що і PiKVM. Відкрийте браузер і перейдіть на адресу. За замовчуванням доступні два облікові записи: для веб-інтерфейсу – admin/admin , для SSH/консолі – root/root . Відразу змініть обидва паролі; дивіться документацію до вашого образу PiKVM OS. https://192.168.0.222
7. Змініть стандартні паролі, щоб забезпечити безпеку пристрою. Детальний опис цього процесу дивіться у документації PiKVM.
PiKVM OS – це операційна система з відкритим вихідним кодом, заснована на Arch Linux. Важливо регулярно оновлювати PiKVM OS, щоб отримувати виправлення безпеки та нові функції. Як і в будь-якій Linux-системі, оновлення виконується через термінал – можна використовувати або ssh-сеанс або термінал у веб-інтерфейсі PiKVM.
Щоб оновити ОС, виконайте таке:
Відкрийте термінал у веб-інтерфейсі PiKVM. Або підключіться по ssh.
Увійдіть під користувачем root (або використовуйте sudo, якщо root вимкнено).
Виконайте
rw, потімpikvm-update(якщо команда відсутня –pacman -S pikvm-os-updater, потімpikvm-update), після завершення –ro; дочекайтеся кінця процесу. Переконайтеся, що під час оновлення пристрій PiKVM не втрачає живлення та підключення до Інтернету.
Існують прикордонні сценарії, коли немає доступу до тієї ж локальної мережі, де знаходиться плата PiKVM — наприклад, пристрій підключений до домашнього сервера, а фізичного доступу до нього немає, проте потрібен віддалений доступ. З огляду на портативність PiKVM, можливим рішенням є використання його іншими користувачами: достатньо підключити пристрій до свого ПК і домашньої мережі, після чого з’являється можливість організувати віддалене підключення до цього ПК, зокрема для виконання завдань на кшталт перевстановлення операційної системи.
Tailscale VPN – безкоштовний інструмент (для особистого використання), який вирішує описані вище завдання. Він допомагає отримати доступ до PiKVM з Інтернету.
Кроки для його налаштування:
Відкрийте термінал у веб-інтерфейсі PiKVM. Або підключіться по ssh.
Встановіть збірку для PiKVM та підніміть сервіс:
su - rw pacman -S tailscale-pikvm systemctl enable --now tailscaled tailscale up (при необходимости: tailscale up --authkey=…) ro
3. У терміналі з’явиться посилання; скопіюйте її та відкрийте у браузері. Після цього увійдіть до Tailscale VPN або зареєструйтеся – і ваш пристрій PiKVM буде прив’язаний до облікового запису.
4. Встановіть клієнт Tailscale на систему, з якою ви плануєте підключатися (не на ПК, яким керуватимете через PiKVM), та підключіться до VPN. Для цього дотримуйтесь цих інструкцій.
5. Після налаштування клієнта на системі відкрийте Tailscale Admin Page . Якщо все зроблено правильно, ви побачите свій пристрій PiKVM та систему, з якою виконується віддалене підключення до PiKVM.
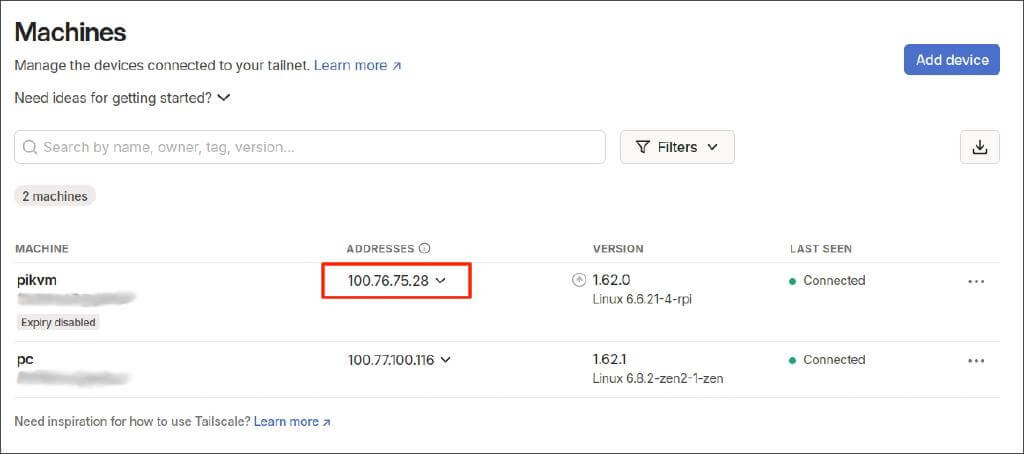
На скріншоті вище виділено приклад IP-адреси, яку слід використовувати у браузері для віддаленого підключення до PiKVM.
6. Для стійкого доступу використовуйте auth-key з потрібним терміном дії (або без закінчення, якщо це допустимо за безпековою політикою) і налаштуйте авто-ротацію ключів у Tailscale Admin Console.
Після завершення налаштування при кожному завантаженні пристрій PiKVM автоматично підключається до мережі VPN. Завдяки цьому віддалений доступ з будь-якого місця можливий за умови підключення ноутбука до тієї ж VPN-мережі, що забезпечує повноцінне керування пристроєм PiKVM.
Це інструкція щодо використання плати PiKVM як портативного пристрою. Для складання підключення знадобляться: пристрій PiKVM, машина, якою ви хочете керувати, нестандартний кабель живлення та адаптер, кабель Ethernet RJ-45, HDMI-кабель.
1. Візьміть кабель Ethernet RJ-45 та підключіть його до пристрою PiKVM та до вашого Wi-Fi-роутера.
2. Підключіть HDMI-кабель: один кінець — HDMI-вхід пристрою PiKVM (через карту захоплення), інший — HDMI-вихід цільової машини.

3. Візьміть нестандартний кабель живлення та підключіть:
USB-C-роз’єм – до пристрою PiKVM.
Підключіть USB-A-роз’єм з міткою „PC/Laptop“ до цільової машини. Це з’єднання емулює клавіатуру, мишу та інші пристрої USB, а також може використовуватися для функцій на кшталт віртуального завантаження з ISO.
USB-A-роз’єм з міткою «Power» — до адаптера живлення.
4. Увімкніть адаптер живлення до розетки. Пристрій PiKVM повинен завантажитися та підключитися до мережі.
5. Увімкніть машину, якою ви бажаєте керувати.
Після цього ви зможете підключитися до пристрою PiKVM та керувати своєю машиною.
Отже, нам вдалося зібрати портативний пристрій KVM over IP, який має корисні можливості:
Пристрій підтримує як Ethernet, так і Wi-Fi. Для стабільної роботи з низькою затримкою рекомендується використовувати дротове підключення.
Пристрій повністю управляється віддалено через VPN.
Пристрій зібрано в унікальному саморобному корпусі та використовує активне охолодження, що запобігає перегріву, тому він може працювати в цілодобовому режимі (24/7) за умови достатнього охолодження та стабільного живлення.