
This article explains in detail how to properly organize the work of an unmanned aerial vehicle (UAV) crew to perform aerial reconnaissance in the field. The effective use of an UAV depends not only on the technical characteristics of the complex, but also on the coordinated work of the team, which must be clearly prepared for flights under any circumstances.
Effective work of the UAV crew requires clear organization and training. Without this, the UAV becomes just an expensive toy. Basic principles:
Focus: The crew must constantly work in their direction – combat missions, training or theoretical training.
Self-motivation: Success depends on discipline and independence, since constant control is impossible.
Flexibility: The crew must adapt to changing conditions, including weather and organizational constraints.
Systematicity: Minimizing external obstacles allows you to save time, energy and avoid mistakes.
Adherence to these principles ensures coordinated and productive work.
The daily routine of a UAV crew is significantly different from a regular soldier’s schedule. The best time for aerial reconnaissance is morning and evening, when the shadows are longest and the air is calm. For night scouts, everything depends on the cooling or heating of the objects to be detected. And sometimes the operating mode is difficult to describe at all, for example, when the copter crew is hunting sabotage and reconnaissance groups.
In addition to flights, you still need to have time to get ready, plan a route, check the equipment, get to the place, prepare the site, and assemble the equipment. Therefore, it is important to have a clear daily schedule, which includes:
Rise and morning hygiene.
Inspection of equipment to make sure everything is ready.
Departure to the flight site.
Site preparation.
Pre-flight inspection of equipment.
Flight execution.
Post-flight inspection of equipment.
Analysis of information received.
Debriefing of flights in the team.
Preparation for the next tasks.
Maintenance of transport, weapons and uniforms.
Evening inspection of equipment.
Respite.
If the weather doesn’t allow for flying, the schedule changes. Instead of flying, training, planning, or intelligence gathering are conducted. In any case, you need to find time for meals, household chores, repairs, or purchasing necessary supplies.
To keep up with everything, each crew member has their own clearly defined roles, and this helps keep the process under control.
The roles did not appear by chance. The staffing schedule of an aerial reconnaissance unit (commander, operator, driver) simply cannot physically take into account all the nuances of the work of this unit. Therefore, regardless of who is listed in the staffing schedule, roles in the crew must be distributed based on the personal knowledge and skills of each crew member.
The commander organizes the work, interacts with the outside world only at the command level. Ensures discipline, is responsible for health, performance and efficiency.
The pilot is the most prepared crew member for working with the remote control. He is engaged in controlling the aircraft in the air.
The mechanic is involved in the repair and maintenance of the complex. He is responsible for the technical condition of the complex (minor repairs, regulations, battery charging). During the flight, he controls the antennas.
The navigator is engaged in navigation in the air and planning on the ground. Collects data on the situation, raises the map. Keeps a logbook. Ensures the operability of the ground station (software, etc.). During the flight, he monitors the readings of the instruments, controls additional equipment.
The driver controls and is responsible for the technical condition and readiness of the vehicle that carries the UAV. He is responsible for ensuring the daily needs of the entire crew (what to eat, where to sleep, how to find it, who to buy it from and where to get it delivered).
Roles in the crew are distributed depending on abilities and inclinations: someone can be a commander, mechanic or navigator, and someone – a pilot or driver. But it is important that each crew member can replace another if necessary. This means that everyone is responsible for the operation of the entire complex, even if the formal responsibility lies with the commander.
When performing your duties, you should not focus only on your own zone. It is useful to check from time to time how things are in other areas. Of course, after completing your work. This approach provides mutual control, which increases flight safety and the efficiency of the complex.
The team’s well-being directly affects the success of the mission. A sleep-deprived pilot can accidentally crash the UAV, and a navigator who has missed an important detail in the planning risks the entire operation. An unstable schedule with early takeoffs and late returns makes it difficult to adhere to the regime. Therefore, it is important to devote time to nutrition and rest before starting work. The driver should take care of everyday comforts in advance: organize a place to sleep, food and water. Even a simple gesture – giving the pilot chocolate before the flight – can improve his concentration and prevent problems.
An aerial reconnaissance aircraft should not stand out among the military, as this makes him a target. Clothing should be functional and inconspicuous. A vest with pockets for tools will be convenient for a mechanic. Footwear – ordinary, but in the rainy season you will need shoe covers, and in winter – warm boots. For work outdoors, you will need a windproof raincoat and glasses from the sun, dust or midges.
It is important for the crew to maintain water balance, as the work requires maximum concentration. In cool weather, you need to drink at least a liter of water per day, and in hot weather – even more. Coffee, carbonated drinks and alcohol should be abandoned, as they reduce mental activity.
On field trips, it is useful to include lard (it is nutritious and contains water), sweets, condensed milk and, accordingly, more water in the diet. This helps to maintain energy in difficult conditions.
Before the flight, it is important to check the technical condition of the UAV, the ground station and the crew’s readiness for work. Each team member has their own area of responsibility, and each reports when they have completed the checks. For example, a mechanic inspects the propeller, control surfaces, servo mechanisms, wing mounts, the condition of the fuselage, antennas and the charge of the UAV’s batteries. Meanwhile, the pilot assembles the antennas, checks the batteries in the antenna unit and the remote control. The navigator mounts the ground station, tests the battery charge on the computers and the operability of the system as a whole.
After that, everything is put together and checked: the connection between the station and the UAV, the camera, the GPS module, the video signal. Then the crew clarifies the tasks, assigns roles for takeoff and landing, and discusses actions in case of unforeseen situations. All these steps are always performed in the same sequence and are assigned to specific crew members.
After landing, the UAV is inspected. For safety reasons, this is usually done after the team leaves the launch site so as not to remain in the “illuminated” area. During the inspection, all parts of the device are carefully checked for damage or malfunctions that may have occurred during the flight or landing. If the device is in good condition, the discharged battery is replaced with a charged one. All flight data is recorded in the flight logbook and battery logbook.
The inspection procedure always follows a clearly defined order. All crew members act synchronously: the mechanic inspects and disassembles the device, the pilot assembles the antenna module, and the navigator turns off the ground station. Having completed all actions, the team quickly leaves the site.
Main types of batteries used in UAVs. There are 5 main types of batteries used today:
Pb (lead-acid);
NiCd (nickel-cadmium);
NiMH (nickel-metal hydride);
LiPo (lithium polymer);
LiFePO4 (lithium ferrophosphate, also known as A123, LiFe, LiFo, lithium phosphate).
Lead-acid (Pb) batteries for UAVs are used mainly as a source of energy for charging other types of batteries in the field or for powering the starter and starting panel of internal combustion engines. Most often, car batteries are used in this role. They are distinguished by their reliability and high recoil currents, but they are heavy and charge slowly.
Nickel-cadmium (NiCd) batteries are used to power transmitters and as power sources in conditions where high recoil currents and long service life are important. However, not all NiCd batteries are suitable for these tasks – household models are not able to deliver high currents, so they are used mainly for transmitters or on-board electronics. Only industrial batteries that can work with high loads are suitable for powering the power plant. Although NiCd batteries are quite unpretentious, they have a high weight and low specific capacity. Among the disadvantages is the “memory effect”, which can complicate operation.
Nickel-metal hydride (NiMh) batteries are designed to replace NiCd. They have a higher capacity for the same weight, less pronounced “memory effect”, but a shorter shelf life.
Lithium-polymer (LiPo) batteries have become the main source of energy for electric UAV engines. They are distinguished by their light weight, high capacity, ability to deliver high currents and fast charging. However, LiPo batteries are sensitive to operating conditions: deep discharge or overvoltage can lead to their failure or even spontaneous combustion. Despite this, their advantages make them the most common for use in UAVs, provided that safety rules are observed.
A new battery from A123 Systems, known as LiFePO4 (lithium iron phosphate), is a novelty. These batteries have high reliability, resistance to shocks and voltage drops, durability and the ability to charge very quickly (15–20 min). They are capable of deep discharge, making them ideal for field conditions. Disadvantages include limited capacity options (up to 2300 mAh), greater weight, and lower voltage compared to LiPo.
Two main methods are used to charge all types of batteries: constant current with variations (for NiCd, NiMh) and the CC-CV method (for Pb, LiPo, LiFePO4). The characteristics of each type of battery determine the nuances of the charging process.
The complexes are stored according to the rules for storing household electronics: in a dry, cool place, disassembled, away from fuel, flammable substances and strong electromagnetic fields (transformers, electric motors, etc.). It should be borne in mind that strong temperature drops lead to the release of moisture, including on the UAV electronics.
This section describes practical recommendations, all statements here are the result of accumulated experience. So, there is a UAV complex, there is a crew that knows how to operate this complex. Where to start work?
The first thing the crew does at the place of duty is to determine the main directions of flights. After that, they look for places for a ground station and take-off/landing. The distance from the demarcation line is usually about 10% of the range of the complex, but the terrain is more important here. It is best to choose a site on a hill to increase the radio horizon and space for maneuvers.
It is worth considering the location of the support points: work at a safe distance from your positions so as not to put them at risk, but not too far so that you can quickly get help or recharge your batteries. Avoid working in the direct line of sight of the enemy.
Before starting work, always check the sites for mines or sabotage groups. This will help avoid ambushes and ensure the safety of the crew.
Any flight must be clearly planned, as spontaneous departures can lead to unforeseen situations. Goals, objectives and restrictions must be defined for each flight, depending on the performance characteristics, weather conditions and external factors. Even for a training flight, there should be a plan that clearly spells out the goals, such as: take off safely, perform maneuvers (right and left turns), fly straight, approach and land.
The limitations of this flight are, for example, the available time in the air (40 minutes, taking into account temperature and wind), without electronic warfare and with mandatory visibility. Even if it is a combat flight, it has clear tasks and a route that is determined by data or empirical assumptions. It is important to plan in advance, check the range, altitude and route, because only after that can the flight begin.
A flight always begins with pre-flight preparation, clarification of weather conditions and checking the crew’s readiness. If these are flights over your own strongholds, it is worth warning them in advance. After the flight, a debriefing is conducted, during which the crew discusses the details of the flight, points out errors and suggests changes. This allows for a complete analysis of actions and equipment, and all important points are recorded in the flight log. The flight log is not a reporting document, its main purpose is to help the crew monitor the technical condition of the UAV, track changes and record the equipment’s resource. Analysis of photos and video materials is not part of the flight debriefing.
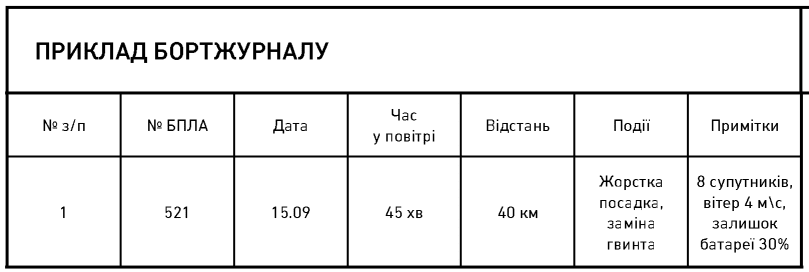
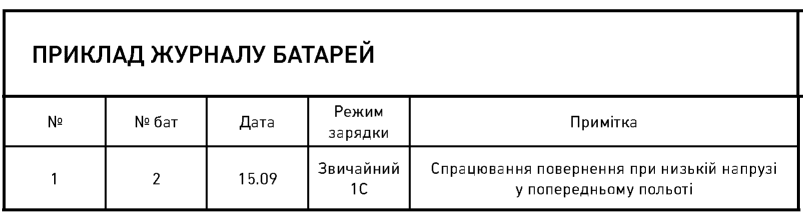
To understand the situation with the battery, it is recommended to keep a logbook, where each battery is signed, it is clear from it the number of operating cycles and the approximate situation with the resource. For example, there is a task: to conduct aerial reconnaissance along a rock road deep in enemy territory. To fly far and long, it is necessary to choose the best battery from the available ones. How to determine the best? The best will be the one that, other things being equal, was charged less often and more evenly.
Many factors affect the range and flight time of a UAV: temperature, wind, humidity, and the technical condition of the device. Usually, data on the range and communication radius from the developer is taken for orientation, but real indicators often differ. If the developer claims a 60 km range on batteries in calm weather, then with a wind of 5 m/s the board will have to travel a greater distance relative to the ground, although the wind will affect only part of the way.
Example: if the board flies at a speed of 20 m/s, and the wind is 5 m/s, then on a path of 48 km the wind will “interfere” only halfway, that is, its speed is equivalently reduced to 2.5 m/s. Therefore, the total flight range will be 54 km, not 48 km.
In real life, the wind does not have a constant speed, and many other factors affect the actual flight range, such as changes in speed and other weather conditions. It is recommended to gradually increase the complexity of flights, analyzing the distance traveled, weather conditions, speed and remaining battery power after each flight. This will allow you to better understand the real capabilities of the complex in different conditions.
10 – 15% of the voltage reserve BEFORE the trigger threshold. It is believed that modern LiPo batteries are not sensitive to the ambient air temperature. This is not entirely true. At sub-zero temperatures, electrochemical reactions in the battery proceed more slowly than at positive temperatures, thereby affecting the strength of the recoil current. Experiments show that capacity loss at low temperatures still occurs. We believe that the loss coefficient for frost is up to 20% depending on the temperature. In any case, it is necessary to understand that at temperatures below 0, the battery capacity is smaller, and how much smaller it is must be clarified through research.
Aerial reconnaissance has a lot in common with fishing. You can search for a target for a long time in a place where it is not, or you can act purposefully, knowing where it may be. In the context of aerial reconnaissance, the enemy, like a fish, has its own “peculiarities”. It is located at bases and strongholds, feeds on warehouses and moves along roads. A topographic map, as well as Google Earth, make it possible to accurately determine the places to search.
Bases are often located on the territories of industrial enterprises, warehouses or even on the territories of sanatoriums or boarding schools. This is not so much available territory for basing. Checkpoints are usually located on roads, near settlements, at entrances and exits, which makes them easier to detect.
Strongpoints are usually located at strategic heights or on the outskirts of settlements. It is important to remember that in order to detect such points, you need to know where to look – this can often be determined by traces and other signs that can be found on the ground.
There are a few important rules to follow to ensure your UAV operates efficiently and without any problems. When surveying roads, do not fly directly over them. Fly slightly to the left or right to make yourself less visible. This will also help you spot artillery positions, which are often located near roads, especially in bad weather.
When flying over enemy positions, do not fly along them, but cross them perpendicularly. This increases your chances of getting a clear shot, and also allows you to make several passes for a better view.
Avoid circling over base camps. Fly sideways so that if you are spotted, it is difficult to identify you. If the enemy spots you, they will not necessarily recognize you because you were flying sideways. Avoid turning directly over targets. When turning, the engine operates at higher power, which attracts attention. Also remember that the camera, if it is not suspended, may not capture the desired area due to the tilt of the UAV.
When shooting the ground with a certain step, try to shoot with an overlap to be sure to get a clear image of the target at least once. Ideally, have several angles. But if you shoot too often, the UAV’s storage becomes clogged with less useful frames, which complicates further processing.
A thermal imager works much more limitedly than a conventional camera. After sunset, the earth’s surface cools unevenly, and “hot” objects, such as equipment or armor, stand out brighter, but quickly darken. Complete cooling takes about two hours, and only then these objects become less noticeable. Traces of people and equipment are visible only a few minutes after they pass.
When working directly from a strong point, additional safety measures must be taken. Standing full-length in positions is not the best choice for a pilot. The use of a radio repeater and working from cover is strongly recommended. You should also remember about radio safety and possible enemy countermeasures on the radio air.
With the exception of the option of using a copter against DRG, a flight to adjust artillery fire is carried out for an already scouted and confirmed target. This makes it possible to calculate the time spent over the target and plan the flight correctly.
If the weather permits, fire adjustment can be carried out from heights of more than 600 meters, especially without fear of enemy anti-aircraft fire and simply circling over the target. If weather conditions or the type of aircraft do not allow working from such heights, it is necessary to make approaches using the “Daisy” method, when each subsequent approach of the UAV to the target is carried out from a different angle than the previous one.

The speed on the approach is chosen to be minimally stable and safe, the angle of the first approaches is against the wind or with a small lateral gradient. Having worked out, the next approach is made, increasing the speed, to reduce the risk of coming under fire
Combating electronic warfare (EW) is an important part of the UAV crew’s tasks, and each of them will sooner or later encounter these obstacles. Since active means of combating EW are currently absent, it is important to work correctly with the received images and videos to identify possible EW positions, in particular vehicles with kungs and vertical shadows that may be reflections of antennas. Often, equipment, especially trucks with kungs, is located in pairs: one vehicle is EW, and the other is a power plant.
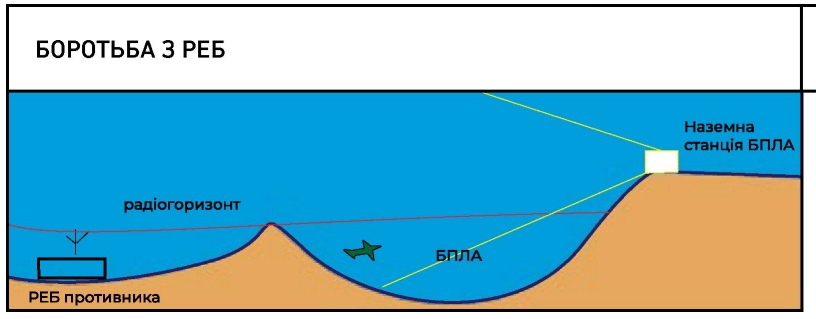
To combat EW, the crew can use maneuvering methods. It is important to choose the right site for the ground control station, since the choice of height provides more opportunities for maneuver. If the station is located on a hill, the radio horizon increases, which allows it to hide behind the terrain from EW obstacles. Therefore, flying at low altitudes, you can reduce the chance of detection.
In the event of being affected by EW, the crew has a choice between returning or breaking through. The return should be carried out in a straight line, not allowing the UAV to circle. This is important, because when GPS is lost, each circle increases the error. If the UAV starts to circle, you can no longer trust the GPS, and you will have to navigate using a magnetic compass, which can also give an error due to the difference with the GPS.
For a more accurate return and reduce the map error, you need to increase its scale to avoid large GPS errors. After that, we adjust the course, gradually changing the direction to turn in the right direction. This will help to return without unnecessary errors.
Breaking through electronic warfare obstacles is also possible, provided that they are narrow enough. Increasing speed and reducing altitude will help to slip through such an obstacle, although this requires some experience. Inexperienced crews are not recommended to engage in “battles” with the enemy’s electronic warfare, as this can lead to loss of control and communication with the UAV.
If communication with the UAV is lost, do not immediately despair. You should try to restore communication by repeating commands. Don’t forget to pinpoint the location of the UAV and point your antenna in its direction to restore the signal. Sometimes using a screen to improve the signal, as we tried with the body armor plates, can help in such situations.
It’s always important to fight to the end, even if the situation seems critical.
To successfully operate a UAV at a short distance from the line of contact with the enemy, it is important to follow several key rules to avoid detection and ensure safe mission execution.
Climb: For small drones with limited range, climb using natural cover such as tall buildings, power lines, or waste dumps. This will help reduce the chance of detection.
Climb Maneuvers: When taking off, it is recommended to raise the drone to a low altitude, drive it to the side, and then return to operating altitude. This reduces the chance of detection at the beginning of the mission.
Landing: Similarly, when landing, the reverse order should be followed – first move to the side, and then gradually reduce altitude.
Avoiding taking off or landing near military personnel: It is extremely important not to take off or land near military personnel, even if they are your own units. Friendly fire can be just as dangerous, as military personnel may not expect the UAV to be in the air.
Friendly fire response: If friendly fire begins, do not attempt to land or fly towards you. In this case, it is important to try to climb up and notify the shooters of your presence.
Slow descent rate: Helicopters have a slow descent rate, so it is recommended to descend gradually when returning to the landing site, always making sure that it is safe.
Turning off navigation lights: To reduce the likelihood of detection, it is necessary to turn off navigation lights, especially at night.
Avoiding sharp turns: When planning missions for aircraft UAVs, it is important to avoid sharp turns. Smooth turns not only save battery power, but also reduce the likelihood of the UAV being detected.
Route corrections: When flying between waypoints, it should be noted that some autopilot firmwares may not have wind drift compensation. This means that the UAV may be carried to the side, and when executing the “Fly here” command, it may not always land exactly on the waypoint, which can lead to errors.
Given these rules, the UAV crew can significantly reduce the likelihood of detection and increase the chances of successfully completing the mission in close proximity to the line of contact with the enemy.
In general, the success of UAV operations depends on the clear coordination and organization of the crew’s work. Each team member must have a clear understanding of their role and responsibility, because even small mistakes can have serious consequences. Important aspects are flight preparation, regular maintenance and ensuring proper conditions for the crew during long missions. A responsible approach to each stage of work guarantees the safety and efficiency of operations.

